


















In EPS integrierte VR-Software, VR verleiht Flügel und macht das Sprühen so einfach!
EPS integriert VR-Funktionen und ermöglicht das Lehren, Reproduzieren und Bedienen von VR-Trajektorien mit Fixpunkten und Tracking sowie die Verteilung an Roboter.
Verwenden Sie keine Offline-Software, Offline-Programmierung oder Simulationsüberprüfung mehr. VR-Programme können Prozess- und Logiksteuerungsanweisungen hinzufügen, um ihre Funktionen zu vervollständigen.

Maximale Nutzlast 8 kg mit maximaler Reichweite 1291 mm Desktop-Roboter zu verkaufen
6-Achs-Desktop-Roboter ER8-1300
- Beschreibung
- Technische Daten
- Produktstrukturdiagramm
-
Beschreibung
Anwendungen
Es kann für Handhabungsvorgänge (Maschinenbedienung), Sortieren, Montieren, Schleifen, Polieren, Lichtbogenschweißen usw. verwendet werden.
Branchen
Geeignet für Leiterplatten, Elektronikfertigung, Kunststoff-, Metallteile- und andere Branchen.

-
Technische Daten
Modell
ER8-1300
Typ
Gelenkig
Gesteuerte Achsen
6 Achsen
Max. Nutzlast am Handgelenk
8 kg
Wiederholbarkeit
±0,03 mm
Robotergewicht
80 kg
Erreichen
1291 mm
Roboter-IP-Klasse
IP65/IP67 (Wist)
IP-Schutzklasse des Gehäuses
IP20/IP54 (optional)
Fahrmodus
AC-Servoantrieb
Installation
Boden, umgedreht, Wand
Installationsumgebung
Umgebungstemperatur 0~45 ℃
Umgebungsfeuchtigkeit
RH≤80%
(Kein Tau oder Frost erlaubt)
Schwingbeschleunigung
4,9 m/s²
(<0,5 G)
Zulässige Belastung
Moment am Handgelenk
J4 25 N·m
J5 25 N·m J6 12 N·m Zulässige Belastung
Trägheit am Handgelenk
J4 0,78 kg·m²
J5 0,78 kg·m² J6 0,3 kg·m² Höchstgeschwindigkeit
J1 230 °/Sek.
J2 190°/Sek. J3 240°/Sek. J4 500°/Sek. J5 420°/Sek. J6 720°/Sek. Bewegungsbereich
J1 ±170°
J2 +100°/-130°
J3 +193°/-75°
J4 ±190°
J5 ±120° J6 ±360° -
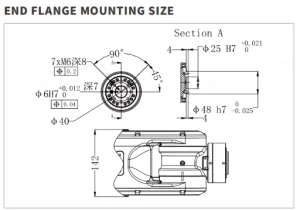
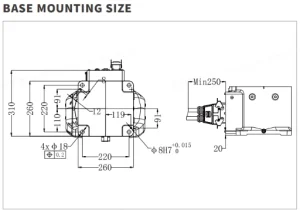
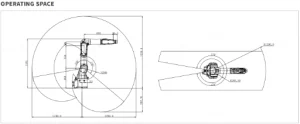
Produktstrukturdiagramm
Produktkategorien
WIE KÖNNEN WIR IHNEN HELFEN
Sie können uns auf jede für Sie passende Weise kontaktieren. Wir sind rund um die Uhr per E-Mail oder Telefon erreichbar.


Verwandte Produkte
-

Maximale Nutzlast 8 kg mit maximaler Reichweite 712 mm Desktop-Roboter zu verkaufen
mehr sehen
Maximale Nutzlast 8 kg mit maximaler Reichweite 712 mm Desktop-Roboter zu verkaufen
-
Tragfähigkeit des Handgelenks:
8KG
-
Erreichbarer Radius:
712mm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP65
mehr sehen
-
-

Maximale Nutzlast 8 kg mit maximaler Reichweite 910 mm Desktop-Roboter zu verkaufen
mehr sehen
Maximale Nutzlast 8 kg mit maximaler Reichweite 910 mm Desktop-Roboter zu verkaufen
-
Tragfähigkeit des Handgelenks:
8KG
-
Erreichbarer Radius:
910mm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP65
mehr sehen
-
-

Maximale Nutzlast 7 kg mit maximaler Reichweite 911 mm Desktop-Roboter zu verkaufen
mehr sehen
Maximale Nutzlast 7 kg mit maximaler Reichweite 911 mm Desktop-Roboter zu verkaufen
-
Tragfähigkeit des Handgelenks:
7KG
-
Erreichbarer Radius:
911mm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP65
mehr sehen
-
-

Maximale Nutzlast 7 kg mit maximaler Reichweite 713 mm Desktop-Roboter zu verkaufen
mehr sehen
Maximale Nutzlast 7 kg mit maximaler Reichweite 713 mm Desktop-Roboter zu verkaufen
-
Tragfähigkeit des Handgelenks:
3KG
-
Erreichbarer Radius:
593mm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP65
mehr sehen
-