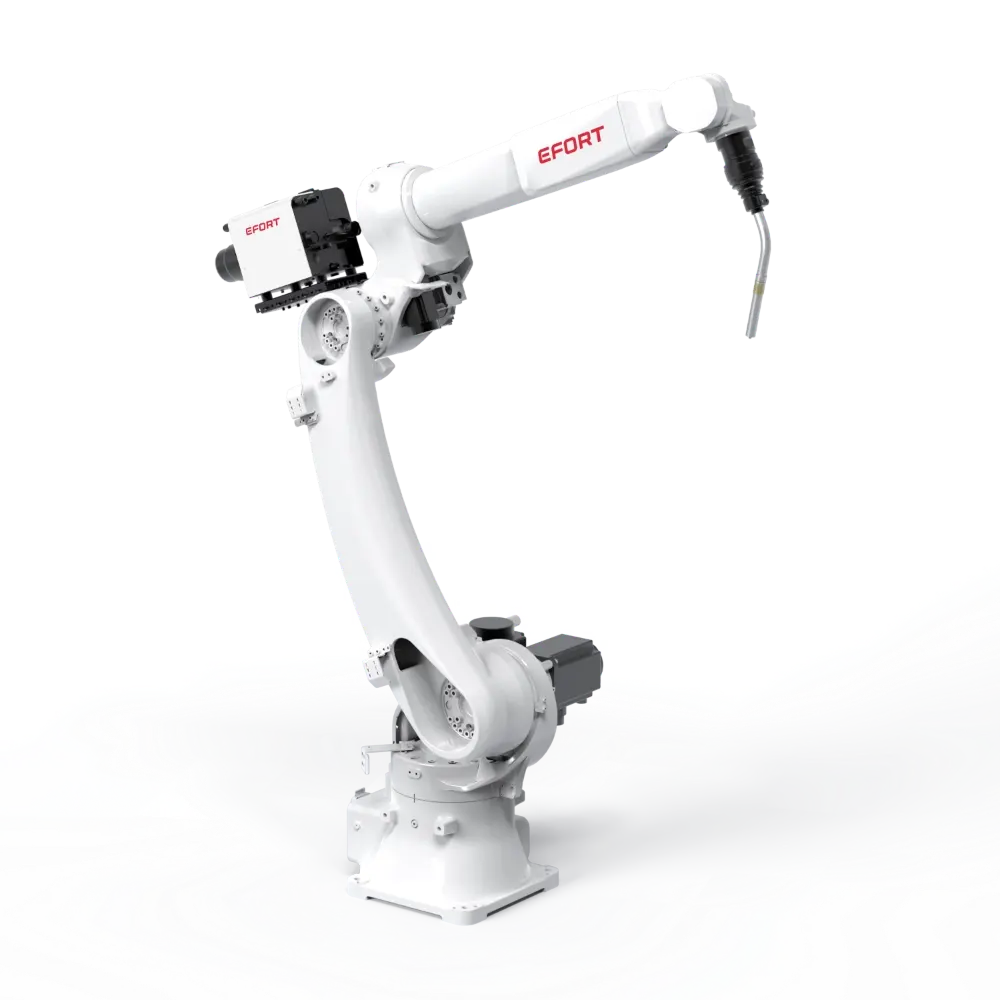
Der EFORT ARC10-1600 ist ein mittelschwerer, gelenkiger 6-Achs-Industrieroboter mit großer Reichweite, der speziell für Lichtbogenschweißanwendungen entwickelt wurde.
Dank seines hervorragenden Kosten-Nutzen-Verhältnisses, des stabilen und zuverlässigen Betriebs sowie der tiefgreifenden Optimierung für Schweißprozesse bietet es herausragende Leistung in Schweißarbeitsplätzen und Produktionslinien in Branchen wie Automobilkomponenten, Baumaschinen, Metallverarbeitung und Stahlkonstruktionen.