


















In EPS integrierte VR-Software, VR verleiht Flügel und macht das Sprühen so einfach!
EPS integriert VR-Funktionen und ermöglicht das Lehren, Reproduzieren und Bedienen von VR-Trajektorien mit Fixpunkten und Tracking sowie die Verteilung an Roboter.
Verwenden Sie keine Offline-Software, Offline-Programmierung oder Simulationsüberprüfung mehr. VR-Programme können Prozess- und Logiksteuerungsanweisungen hinzufügen, um ihre Funktionen zu vervollständigen.

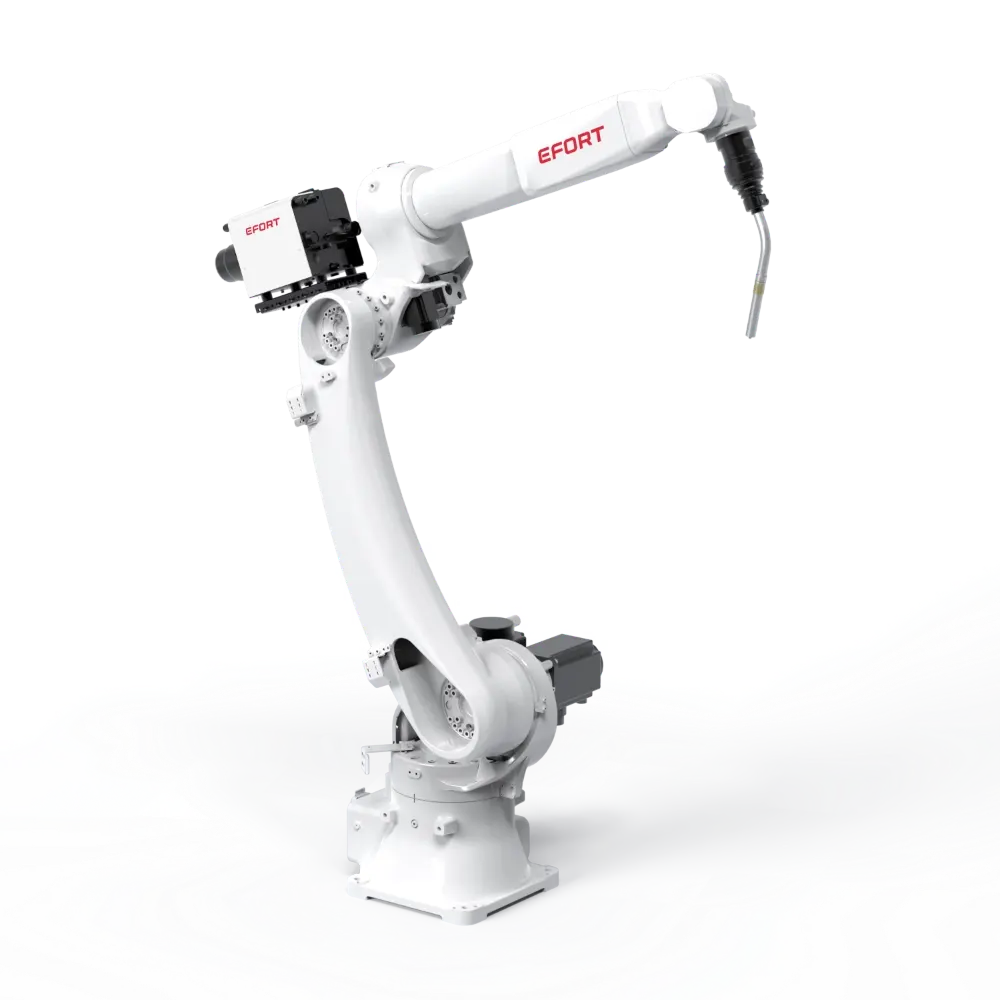
Maximale Nutzlast 12 kg mit maximaler Reichweite 1479 mm Schweißroboter zu verkaufen
Ein Schweißroboter ARC12-1400
- Beschreibung
- Technische Daten
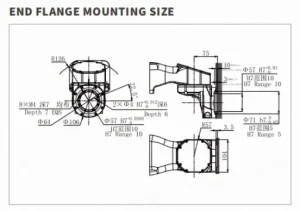
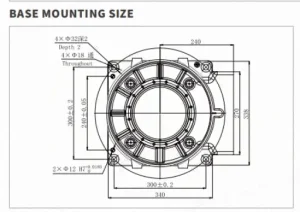
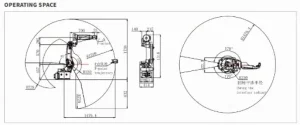
- Produktstrukturdiagramm
-
Beschreibung
Highlights
Dank der großen, hohlen Bauweise kann das Kabel hohl verlegt werden, was die Lebensdauer des Kabels effektiv verlängert und die Verlegung in engen Räumen flexibler gestaltet.
Das hochsteife Getriebe mit hoher Stoßfestigkeit hilft Kunden bei der Bewältigung verschiedenster Anwendungsszenarien;
Dank des hochsteifen Getriebedesigns und des fortschrittlichen Trajektorienalgorithmus hilft die verbesserte Robotergenauigkeit den Kunden, eine Vielzahl von Anwendungsszenarien zu bewältigen.Anwendungen
Es kann beim Lichtbogenschweißen eingesetzt werden.
Branchen
Geeignet für Metallteile, Autoteile, Stahlkonstruktionen und andere Branchen.

-
Technische Daten
Modell
ARC12-1400
Typ
Gelenkig
Gesteuerte Achsen
6 Achsen
Max. Nutzlast am Handgelenk
12 kg
Wiederholbarkeit
±0,03 mm
Robotergewicht
165 kg
Erreichen
1479 mm
Roboter-IP-Klasse
IP54 / IP67 (Handgelenk)
IP-Schutzklasse des Gehäuses
IP54
Fahrmodus
AC-Servoantrieb
Installation
Boden, Kopfüber, Wand
Installationsumgebung
Umgebungstemperatur 0~45 ℃
Umgebungsfeuchtigkeit
RH≤80%
(Kein Tau oder Frost erlaubt)
Schwingbeschleunigung
4,9 m/s²
(<0,5 G)
Zulässige Belastung
Moment am Handgelenk
J4 26 N·m
J5 26 N·m J6 11 N·m Zulässige Belastung
Trägheit am Handgelenk
J4 0,9 kg·m²
J5 0,9 kg·m² J6 0,3 kg·m² Höchstgeschwindigkeit
J1 265°/Sek.
J2 255°/Sek. J3 270°/Sek. J4 450°/Sek. J5 450°/Sek. J6 700°/Sek. Bewegungsbereich
J1 ±170°
J2 +85°/-150°
J3 +175°/-85°
J4 ±190°
J5 ±190° (Die Verbindung erfolgt außerhalb des Robotergehäuses.)
±140° (Die Verbindung befindet sich im Inneren des Robotergehäuses.)J6 ±450° (Die Verbindung erfolgt außerhalb des Robotergehäuses.)
±220° (Die Verbindung befindet sich im Inneren des Robotergehäuses.) -
Produktstrukturdiagramm
Produktkategorien
WIE KÖNNEN WIR IHNEN HELFEN
Sie können uns auf jede für Sie passende Weise kontaktieren. Wir sind rund um die Uhr per E-Mail oder Telefon erreichbar.


Verwandte Produkte
-

Maximale Nutzlast 10 kg mit maximaler Reichweite 1604 mm Schweißroboter zu verkaufen
mehr sehen
Maximale Nutzlast 10 kg mit maximaler Reichweite 1604 mm Schweißroboter zu verkaufen
-
Tragfähigkeit des Handgelenks:
10KG
-
Erreichbarer Radius:
1604mm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP54
mehr sehen
-
-
Maximale Nutzlast 12 kg mit maximaler Reichweite 2025 mm Schweißroboter zu verkaufen
mehr sehen
Maximale Nutzlast 12 kg mit maximaler Reichweite 2025 mm Schweißroboter zu verkaufen
-
Tragfähigkeit des Handgelenks:
12KG
-
Erreichbarer Radius:
2025mm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP54
mehr sehen
-