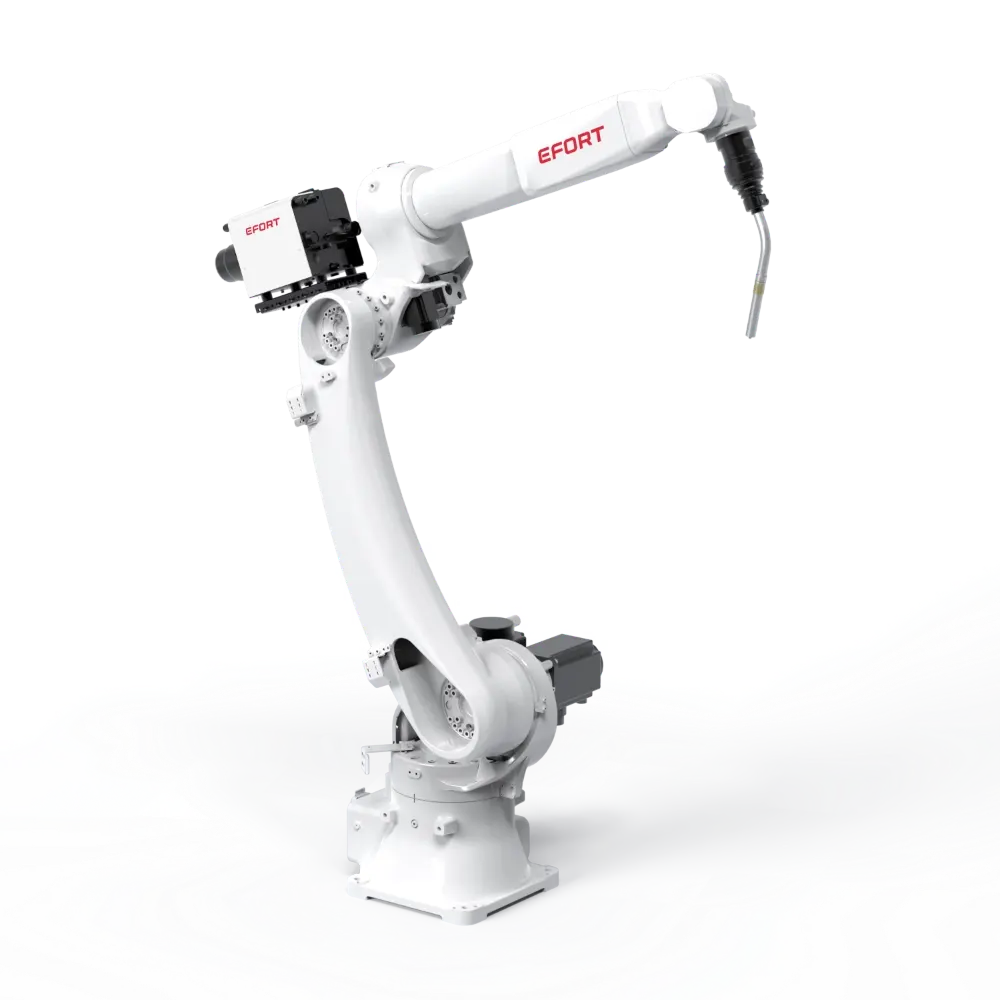
EFORT ARC10-1600 es un robot industrial articulado de 6 ejes, de largo alcance y carga útil media, diseñado específicamente para aplicaciones de soldadura por arco.
Con su excelente relación costo-rendimiento, operación estable y confiable y profunda optimización para procesos de soldadura, ofrece un rendimiento excepcional en estaciones de trabajo de soldadura y líneas de producción en industrias como componentes automotrices, maquinaria de construcción, fabricación de metales y estructuras de acero.