


















¡Software VR integrado en EPS, VR toma alas y hace que la pulverización sea muy sencilla!
EPS integra funciones de VR, lo que permite la enseñanza, reproducción y operación de trayectorias de VR de punto fijo y seguimiento, y su distribución a robots.
Ya no es necesario usar software, programación ni verificación de simulación sin conexión. Los programas de RV pueden añadir instrucciones de control de procesos y lógica para que sus funciones sean más completas.
Robot de soldadura en venta con carga útil máxima de 12 kg y alcance máximo de 2025 mm.
Un robot de soldadura ARC12-2000
- descripción
- Presupuesto
- Diagrama de estructura del producto
-
descripción
Reflejos
Gracias a su diseño amplio y hueco, el cable puede enrutarse de forma hueca, mejorando eficazmente su vida útil, y el cambio de posición en un espacio reducido resulta más flexible;
La caja de cambios de alta rigidez con gran resistencia a los impactos ayuda a los clientes a afrontar diversos escenarios de aplicación;
Gracias al diseño de transmisión de alta rigidez y al algoritmo de trayectoria avanzado, el rendimiento de precisión mejorado ayuda a los clientes a afrontar una variedad de escenarios de aplicación.Aplicaciones
Puede utilizarse en aplicaciones de soldadura por arco.
Industrias
Apto para piezas metálicas, autopartes, estructuras de acero y otras industrias.
-
Presupuesto
Modelo
ARC12-2000
Tipo
Articulado
ejes controlados
6 ejes
Carga útil máxima en la muñeca
12 kg
Repetibilidad
±0,03 mm
Peso del robot
185 kg
Alcanzar
2025 mm
Grado IP para robots
IP54 / IP67 (Muñeca)
Grado de protección IP del armario
IP54
Modo de conducción
servoaccionamiento de CA
Instalación
Piso, boca abajo
Entorno de instalación
Temperatura ambiente 0~45 ℃
humedad ambiental
RH≤80%
(No se permite ni rocío ni heladas)
Aceleración de vibración
4,9 m/s²
(<0,5 G)
Carga admisible
momento en la muñeca
J4 22 N·m
J5 22 N·m J6 9,8 N·m Carga admisible
inercia en la muñeca
J4 0,65 kg·m²
J5 0,65 kg·m² J6 0,17 kg·m² Velocidad máxima
J1 220°/seg
J2 180°/seg J3 210°/seg J4 420°/seg J5 420°/seg J6 700°/seg Rango de movimiento
J1 ±170°
J2 +77°/-160°
J3 +175°/-85°
J4 ±190°
J5 ±190° (Conexión con el exterior del cuerpo del robot).
±140° (La conexión se realiza dentro del cuerpo del robot).J6 ±450° (Conexión con el exterior del cuerpo del robot).
±220° (La conexión se realiza dentro del cuerpo del robot). -
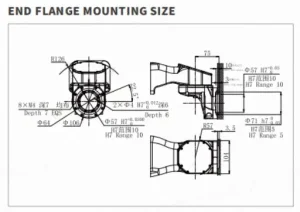
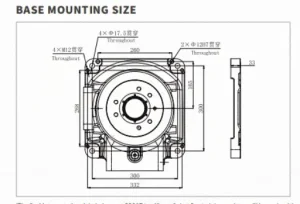
Diagrama de estructura del producto

Categorías de productos
¿CÓMO PODEMOS AYUDARTE?
Puede contactarnos de la forma que le resulte más conveniente. Estamos disponibles 24/7 por correo electrónico o teléfono.


Productos relacionados
-

Robot de soldadura en venta con carga útil máxima de 12 kg y alcance máximo de 1479 mm.
ver más
Robot de soldadura en venta con carga útil máxima de 12 kg y alcance máximo de 1479 mm.
-
Capacidad de carga de la muñeca:
12Kilogramo
-
Radio alcanzable:
1479mm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP54
ver más
-
-

Robot de soldadura en venta con carga útil máxima de 10 kg y alcance máximo de 1604 mm.
ver más
Robot de soldadura en venta con carga útil máxima de 10 kg y alcance máximo de 1604 mm.
-
Capacidad de carga de la muñeca:
10Kilogramo
-
Radio alcanzable:
1604mm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP54
ver más
-