


















¡Software VR integrado en EPS, VR toma alas y hace que la pulverización sea muy sencilla!
EPS integra funciones de VR, lo que permite la enseñanza, reproducción y operación de trayectorias de VR de punto fijo y seguimiento, y su distribución a robots.
Ya no es necesario usar software, programación ni verificación de simulación sin conexión. Los programas de RV pueden añadir instrucciones de control de procesos y lógica para que sus funciones sean más completas.

Robot de pintura de muñeca Lemma de 6 ejes con alcance de 2900 mm y carga útil de 15 kg, a la venta
Robot de pintura de 6 ejes con muñeca hueca GR6150-2900
- descripción
- Presupuesto
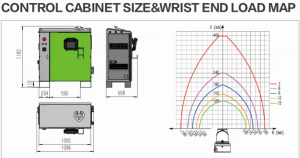
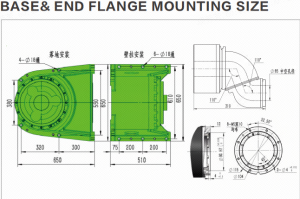
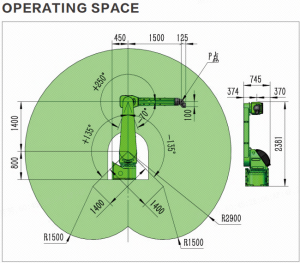
- Diagrama de estructura del producto
-
descripción
Centrándonos en la industria automotriz y de autopartes, control centralizado de equipos de proceso de pulverización, desarrollo de un grupo de productos de bombas de engranajes de dos componentes, formación de un conjunto completo de soluciones y ventas de conjuntos completos.
Reflejos
Muñeca hueca de gran tamaño con posibilidad de instalación de tuberías de pintura en la muñeca, para una integración conveniente; El armario de control eléctrico cumple con el nivel de seguridad EN ISO13849 PLd y admite ejes auxiliares; Software de aplicación de pintura estándar, E/S integradas, fácil integración, programación sencilla; Certificación a prueba de explosiones ATEX de China y la UE, se puede utilizar en entornos operativos peligrosos de gas de zona 1 y polvo de zona 21.
Aplicaciones
Diseñado especialmente para aplicaciones de pintura en la industria automotriz: como carrocerías, parachoques;
También se puede utilizar para pintar contenedores, vehículos de ingeniería y otras piezas de gran tamaño.
Industrias
Apto para la industria automotriz y de autopartes, triciclos y otras industrias.

-
Presupuesto
Carga útil de la muñeca
15 kg
Alcanzar
2900 mm
Repetibilidad
±0,2 mm
Rango de movimiento
&
Velocidad
Rango
Velocidad
J 1
±160°
120 °/s
J 2
±135°
120 °/s
J 3
-75 °/+250 °C
120 °/s
J 4
±540°
360 °/s
J 5
±540°
420 °/s
J 6
±540°
530 °/s
Par admisible
J 4
44,2 N·m
J 5
28,8 N·m
J 6
15,1 N·m
Momento de inercia admisible
J 4
1,17 kg . m2
J 5
0,87 kg . m2
J 6
0,15 kg . m2
Estructura
Estructura en serie de 6 ejes
Instalación
Suelo, Ángel, Pared, Boca abajo
Nivel de seguridad
EN ISO13849 PLd
Grado de protección IP
Robot
IP 6
Gabinete
IP54
A prueba de explosiones
Porcelana
Ex ib mb px IIC T4 Gb
Gas ATEX
II 2G Ex pxb IIC T4 Gb
Polvo ATEX
II 2D Ex pxb IIIC T135℃ Db
Requisitos ambientales
Voltaje
CA 380 V (±101 TP3T)
Capacidad de potencia
5,0 kVA
Temperatura 0-45 ℃
Humedad
20-80RH (sin condensación)
Carga útil del brazo
Brazo exterior
15 kg
Brazo interior
15 kg
Peso
Robot
640 kg
Gabinete
160 kilos
-
Diagrama de estructura del producto
Categorías de productos
¿CÓMO PODEMOS AYUDARTE?
Puede contactarnos de la forma que le resulte más conveniente. Estamos disponibles 24/7 por correo electrónico o teléfono.


Productos relacionados
-

Robot de pintura de muñeca hueca de 6 ejes con alcance de 1500 mm y carga útil de 15 kg en venta
ver más
Robot de pintura de muñeca hueca de 6 ejes con alcance de 1500 mm y carga útil de 15 kg en venta
-
Capacidad de carga de la muñeca:
15Kilogramo
-
Radio alcanzable:
1500mm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP54
ver más
-
-

Robot de pintura de muñeca de 6 ejes con alcance de 3240 mm y carga útil de 16 kg. Suministro global.
ver más
Robot de pintura de muñeca de 6 ejes con alcance de 3240 mm y carga útil de 16 kg. Suministro global.
-
Capacidad de carga de la muñeca:
16Kilogramo
-
Radio alcanzable:
3240mm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP54
ver más
-
-

Robot de pintura de muñeca Lemma de 6 ejes con alcance de 1929 mm y carga útil de 3 kg, a la venta
ver más
Robot de pintura de muñeca Lemma de 6 ejes con alcance de 1929 mm y carga útil de 3 kg, a la venta
-
Capacidad de carga de la muñeca:
3Kilogramo
-
Radio alcanzable:
1929mm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP52
ver más
-
-

Robot de pintura de muñeca Lemma de 6 ejes con 8 kg de carga útil y alcance de 2715 mm, a la venta
ver más
Robot de pintura de muñeca Lemma de 6 ejes con 8 kg de carga útil y alcance de 2715 mm, a la venta
-
Capacidad de carga de la muñeca:
8Kilogramo
-
Radio alcanzable:
2715mm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP54
ver más
-