


















Logiciel VR intégré à l'EPS, la VR prend son envol, rendant la pulvérisation si simple !
EPS intègre des fonctions VR, permettant l'enseignement, la reproduction et le fonctionnement de trajectoires VR à point fixe et à suivi, ainsi que la distribution aux robots.
Fini les logiciels hors ligne, la programmation hors ligne et la vérification des simulations. Les programmes de RV peuvent ajouter des instructions de contrôle de processus et de logique pour optimiser leurs fonctionnalités.

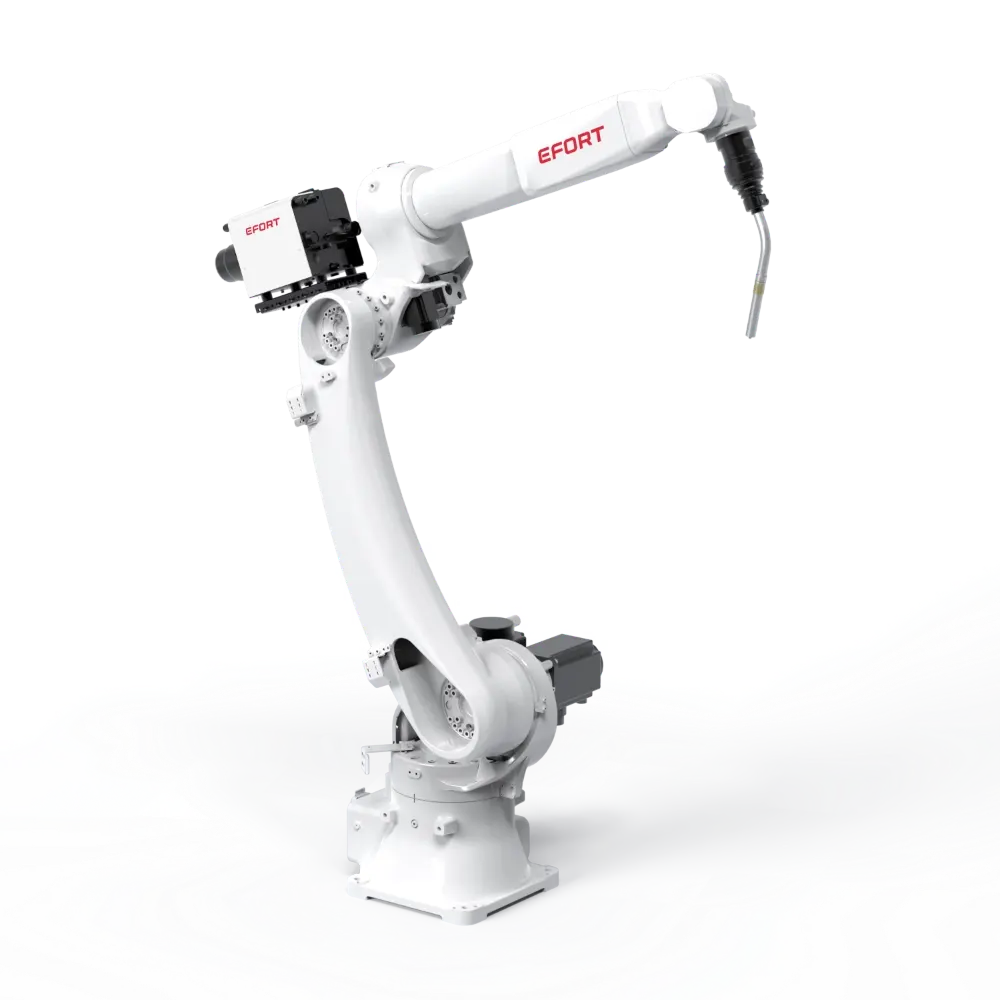
Robot de soudage à vendre : charge utile maximale de 12 kg et portée maximale de 1 479 mm
Robot de soudage ARC12-1400
- description
- Caractéristiques
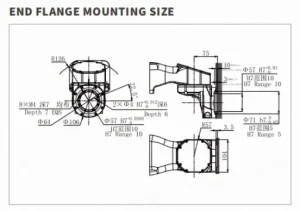
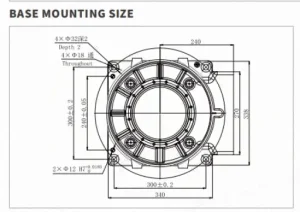
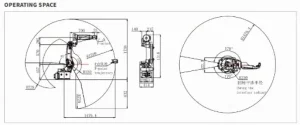
- Diagramme de structure du produit
-
description
Points forts
Grâce à sa conception large et creuse, le câble peut être acheminé de manière creuse, ce qui améliore efficacement sa durée de vie et permet un changement de position plus flexible dans un espace restreint ;
Une boîte de vitesses à haute rigidité et à forte résistance aux chocs aide les clients à relever divers défis d'application ;
Grâce à la conception de transmission à haute rigidité et à l'algorithme de trajectoire avancé, les performances améliorées en matière de précision du robot aident les clients à faire face à une variété de scénarios d'application.Applications
Il peut être utilisé dans les applications de soudage à l'arc.
Industries
Convient aux pièces métalliques, aux pièces automobiles, aux structures en acier et à d'autres industries.

-
Caractéristiques
Modèle
ARC12-1400
Taper
Articulé
Axes contrôlés
6 haches
Charge utile maximale au poignet
12 kg
Répétabilité
±0,03 mm
Poids du robot
165 kg
Atteindre
1479 mm
Robot IP grade
IP54 / IP67 (bracelet)
Armoire de qualité IP
IP54
Mode de conduite
servomoteur AC
Installation
Sol, à l'envers, mur
environnement d'installation
Température ambiante 0~45 ℃
Humidité ambiante
RH≤80%
(Ni rosée ni gel ne sont autorisés)
Accélération des vibrations
4,9 m/s²
(<0,5 G)
Charge admissible
moment au poignet
J4 26 N·m
J5 26 N·m J6 11 N·m Charge admissible
inertie au niveau du poignet
J4 0,9 kg·m²
J5 0,9 kg·m² J6 0,3 kg·m² vitesse maximale
J1 265°/sec
J2 255°/sec J3 270°/sec J4 450°/s J5 450°/s J6 700°/s Amplitude de mouvement
J1 ±170°
J2 +85°/-150°
J3 +175°/-85°
J4 ±190°
J5 ±190° (Connexion extérieure au corps du robot.)
±140° (Connexion à l'intérieur du corps du robot.)J6 ±450° (Connexion extérieure au corps du robot.)
±220° (Connexion à l'intérieur du corps du robot.) -
Diagramme de structure du produit
Catégories de produits
COMMENT POUVONS-NOUS VOUS AIDER
Vous pouvez nous contacter par le moyen qui vous convient. Nous sommes disponibles 24h/24 et 7j/7 par e-mail ou par téléphone.


Produits connexes
-

Robot de soudage à vendre : charge utile maximale de 10 kg et portée maximale de 1 604 mm
voir plus
Robot de soudage à vendre : charge utile maximale de 10 kg et portée maximale de 1 604 mm
-
Capacité de charge du poignet :
10KG
-
Rayon atteignable :
1604mm
-
Nombre d'axes de contrôle :
6axe
-
Niveau de protection de l'armoire de commande :
IP54
voir plus
-
-
Robot de soudage à vendre, charge utile maximale de 12 kg et portée maximale de 2 025 mm
voir plus
Robot de soudage à vendre, charge utile maximale de 12 kg et portée maximale de 2 025 mm
-
Capacité de charge du poignet :
12KG
-
Rayon atteignable :
2025mm
-
Nombre d'axes de contrôle :
6axe
-
Niveau de protection de l'armoire de commande :
IP54
voir plus
-