


















Logiciel VR intégré à l'EPS, la VR prend son envol, rendant la pulvérisation si simple !
EPS intègre des fonctions VR, permettant l'enseignement, la reproduction et le fonctionnement de trajectoires VR à point fixe et à suivi, ainsi que la distribution aux robots.
Fini les logiciels hors ligne, la programmation hors ligne et la vérification des simulations. Les programmes de RV peuvent ajouter des instructions de contrôle de processus et de logique pour optimiser leurs fonctionnalités.

Robot de peinture au poignet Lemma 6 axes, charge utile 15 kg, portée 2900 mm, à vendre
Robot de peinture 6 axes à poignet creux GR6150-2900
- description
- Caractéristiques
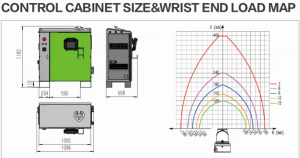
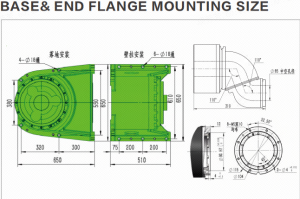
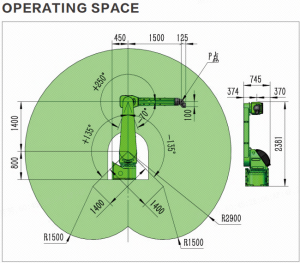
- Diagramme de structure du produit
-
description
Spécialisés dans l'industrie automobile et des pièces automobiles, nous assurons le contrôle centralisé des équipements de pulvérisation, la réalisation du développement d'une gamme de pompes à engrenages bicomposantes, la mise en place d'une offre complète de solutions et la vente de solutions complètes !
Points forts
Poignet creux de grande taille avec possibilité d'intégration de conduites de peinture intégrées ; l'armoire de commande électrique est conforme à la norme EN ISO 13849 niveau de sécurité PLd et prend en charge les axes auxiliaires ; logiciel d'application de peinture standard, E/S intégrées, intégration facile, programmation simple ; certification antidéflagrante ATEX Chine et Europe, utilisable en zone 1 (gaz) et zone 21 (poussières).
Applications
Spécialement conçu pour les applications de peinture dans l'industrie automobile : telles que la carrosserie, les pare-chocs ;
Peut également être utilisé pour la peinture de conteneurs, d'engins de chantier et autres pièces de grande taille.
Industries
Convient aux secteurs de l'automobile et des pièces automobiles, des tricycles et autres industries.

-
Caractéristiques
Charge utile au poignet
15 kg
Atteindre
2900 mm
Répétabilité
±0,2 mm
Plage de mouvement
&
Vitesse
Gamme
Vitesse
J 1
±160°
120 °/s
J 2
±135°
120 °/s
J 3
-75 °/+250 °
120 °/s
J 4
±540°
360 °/s
J 5
±540°
420 °/s
J 6
±540°
530 °/s
Couple admissible
J 4
44,2 N.m
J 5
28,8 N.m
J 6
15,1 N.m
Moment d'inertie admissible
J 4
1,17 kg . m2
J 5
0,87 kg . m2
J 6
0,15 kg . m2
Structure
Structure de la série à 6 axes
Installation
Sol, Ange, Mur, À l'envers
Niveau de sécurité
EN ISO13849 PLd
Indice de protection IP
Robot
IP 6
Armoire
IP 54
Antidéflagrant
Chine
Ex ib mb px IIC T4 Gb
ATEX-Gaz
II 2G Ex pxb IIC T4 Gb
ATEX-Poussière
II 2D Ex pxb IIIC T135℃ Db
Exigences environnementales
Tension
CA 380 V (± 101 TP3T)
Capacité de puissance
5,0 kVA
Température 0-45 ℃
Humidité
20-80RH (sans condensation)
Charge utile du bras
Bras extérieur
15 kg
Bras intérieur
15 kg
Poids
Robot
640 kg
Armoire
160 kg
-
Diagramme de structure du produit
Catégories de produits
COMMENT POUVONS-NOUS VOUS AIDER
Vous pouvez nous contacter par le moyen qui vous convient. Nous sommes disponibles 24h/24 et 7j/7 par e-mail ou par téléphone.


Produits connexes
-

Robot de peinture au poignet à 6 axes, charge utile de 16 kg, portée de 3 240 mm, approvisionnement mondial
voir plus
Robot de peinture au poignet à 6 axes, charge utile de 16 kg, portée de 3 240 mm, approvisionnement mondial
-
Capacité de charge du poignet :
16KG
-
Rayon atteignable :
3240mm
-
Nombre d'axes de contrôle :
6axe
-
Niveau de protection de l'armoire de commande :
IP54
voir plus
-
-

Robot de peinture au poignet Lemma 6 axes, charge utile 8 kg, portée 2715 mm, à vendre
voir plus
Robot de peinture au poignet Lemma 6 axes, charge utile 8 kg, portée 2715 mm, à vendre
-
Capacité de charge du poignet :
8KG
-
Rayon atteignable :
2715mm
-
Nombre d'axes de contrôle :
6axe
-
Niveau de protection de l'armoire de commande :
IP54
voir plus
-
-

Robot de peinture au poignet Lemma 6 axes, charge utile 3 kg, portée 1929 mm, à vendre
voir plus
Robot de peinture au poignet Lemma 6 axes, charge utile 3 kg, portée 1929 mm, à vendre
-
Capacité de charge du poignet :
3KG
-
Rayon atteignable :
1929mm
-
Nombre d'axes de contrôle :
6axe
-
Niveau de protection de l'armoire de commande :
IP52
voir plus
-
-

Robot de peinture à poignet creux 6 axes, charge utile 15 kg, portée 1500 mm, à vendre
voir plus
Robot de peinture à poignet creux 6 axes, charge utile 15 kg, portée 1500 mm, à vendre
-
Capacité de charge du poignet :
15KG
-
Rayon atteignable :
1500mm
-
Nombre d'axes de contrôle :
6axe
-
Niveau de protection de l'armoire de commande :
IP54
voir plus
-