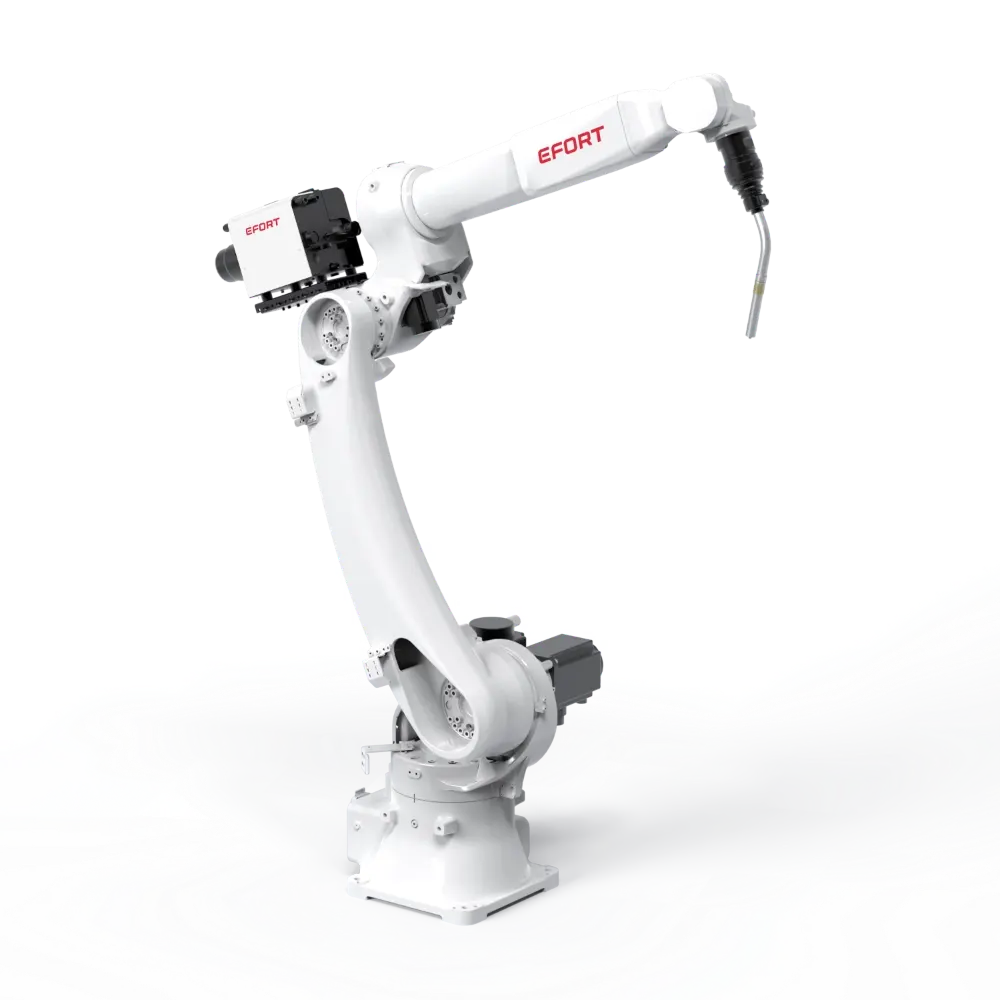
EFORT ARC10-1600 は、アーク溶接用途向けに特別に設計された、中荷重、長距離の 6 軸多関節型産業用ロボットです。
優れたコストパフォーマンス、安定した信頼性の高い動作、溶接プロセスに対する徹底した最適化により、自動車部品、建設機械、金属加工、鉄骨構造など、さまざまな業界の溶接ワークステーションや生産ラインで優れたパフォーマンスを発揮します。
大型で中空の設計により、ケーブルを中空に配線することができ、ケーブルの耐用年数を効果的に向上させ、狭いスペースでの姿勢変更がより柔軟になります。
耐衝撃性に優れた高剛性ギアボックスは、お客様がさまざまなアプリケーションシナリオに挑戦するのに役立ちます。
高剛性トランスミッション設計と高度な軌道アルゴリズムにより、ロボットの精度性能が向上し、お客様はさまざまなアプリケーション シナリオに対応できるようになります。
アーク溶接用途に使用できます。
金属部品、自動車部品、鉄骨構造物、その他の産業に適しています。

|
モデル |
ARC10-1600 |
|
|
タイプ |
関節式 |
|
|
制御軸 |
6軸 |
|
|
手首の最大荷重 |
10キロ |
|
|
再現性 |
±0.03 mm |
|
|
ロボットの重量 |
170kg |
|
|
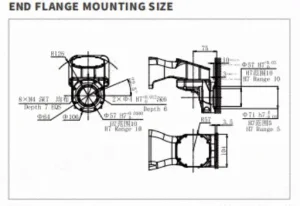
到着 |
1604ミリメートル |
|
|
ロボットIPグレード |
IP54 / IP67(手首) |
|
|
キャビネットIPグレード |
IP54 |
|
|
ドライブモード |
ACサーボドライブ |
|
|
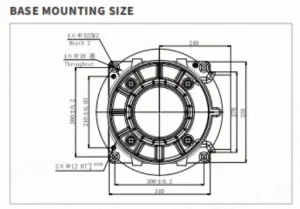
インストール |
床、逆さま、壁 |
|
|
インストール環境 |
周囲温度 |
0~45℃ |
|
周囲の湿度 |
RH≤80% (露や霜が降りないこと) |
|
|
振動加速度 |
4.9 m/s² (<0.5 G) |
|
|
許容荷重 手首の瞬間 |
J4 |
22 N·m |
| J5 | 22 N·m | |
| J6 | 9.8 N·m | |
|
許容荷重 手首の慣性 |
J4 |
0.65 kg·m² |
| J5 | 0.65 kg·m² | |
| J6 | 0.17 kg·m² | |
|
最高速度 |
J1 |
265°/秒 |
| J2 | 255°/秒 | |
| J3 | 270°/秒 | |
| J4 | 450°/秒 | |
| J5 | 450°/秒 | |
| J6 | 700°/秒 | |
|
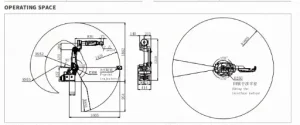
動作範囲 |
J1 |
±170° |
| J2 |
+85°/-150° |
|
| J3 |
+175°/-85° |
|
| J4 |
±190° |
|
| J5 | ±190°(ロボット本体外部接続) ±140°(ロボット本体内部接続) |
|
| J6 | ±450°(ロボット本体外部接続) ±220°(ロボット本体内部接続) |