EPS に統合された VR ソフトウェアにより、VR が翼を広げ、スプレー作業が非常に簡単になります。
EPSはVR機能を統合しており、固定点および追従VR軌道の教示、再現および操作、ロボットへの配信が可能になります。
オフラインソフトウェア、オフラインプログラミング、シミュレーション検証はもう不要です。VRプログラムにプロセスとロジック制御命令を追加することで、機能をより充実させることができます。
- 説明
- 仕様
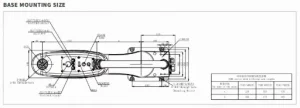
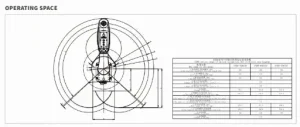
- 製品構造図
-
説明
ハイライト
1. 高いリズムと高い精度
最速の標準サイクルタイムは 0.346 秒に達し、ロボットの位置決め精度は 0.02 mm に達します。
2. 高剛性・低振動
ロボット本体のモードと剛性強化、振動抑制機能およびアクティブ振動抑制機能を組み合わせることで、振動を効果的に低減します。
3. メンテナンスが容易で拡張性がある
ケーブルとバッテリーの着脱構造により、デバイス内のロボットの交換が可能になり、内蔵カメラネットワークケーブルにより、さまざまな通信拡張が可能になります。
アプリケーション
ハンドリング、仕分け、組み立てなどに使用できます。
産業
電子機器製造、リチウム電池、自動車用電子機器、太陽光発電などの業界に適しています。

-
仕様
モデル
ESR6-500Z20 到着 500ミリメートル 手首の最大荷重
評価
2キロ 最大
6キロ ロボットの重量
18キロ 最高速度
J1+J2 7120 mm/秒
J3 1100 mm/秒 J4 2000°/秒 動作範囲
J1 ±132°
J2 ±150°
J3 200mm J4 ±360°
再現性
J1+J2 ±0.02 mm
J3 ±0.01 mm J4 ±0.01°
標準サイクルタイム
0.346秒
J4 許容
慣性モーメント
評価 0.01 kg·m²
最大 0.12 kg·m²
電線
D-Sub 15ピン
空気圧ライン
φ4mm×1、φ6mm×2
J3下向きの力
100 N インストール
床
インストール環境
周囲温度
5~40℃
周囲の湿度
RH≤80%(結露・霜がつかないこと)
-
製品構造図