


















Software VR integrado ao EPS, VR ganha asas, tornando a pulverização muito mais simples!
O EPS integra funções de RV, permitindo o ensino, a reprodução e a operação de trajetórias de RV de ponto fixo e rastreamento, além da distribuição para robôs.
Não utilize mais software offline, programação offline ou verificação de simulação. Programas de RV podem adicionar instruções de controle de processo e lógica para tornar suas funções mais completas.
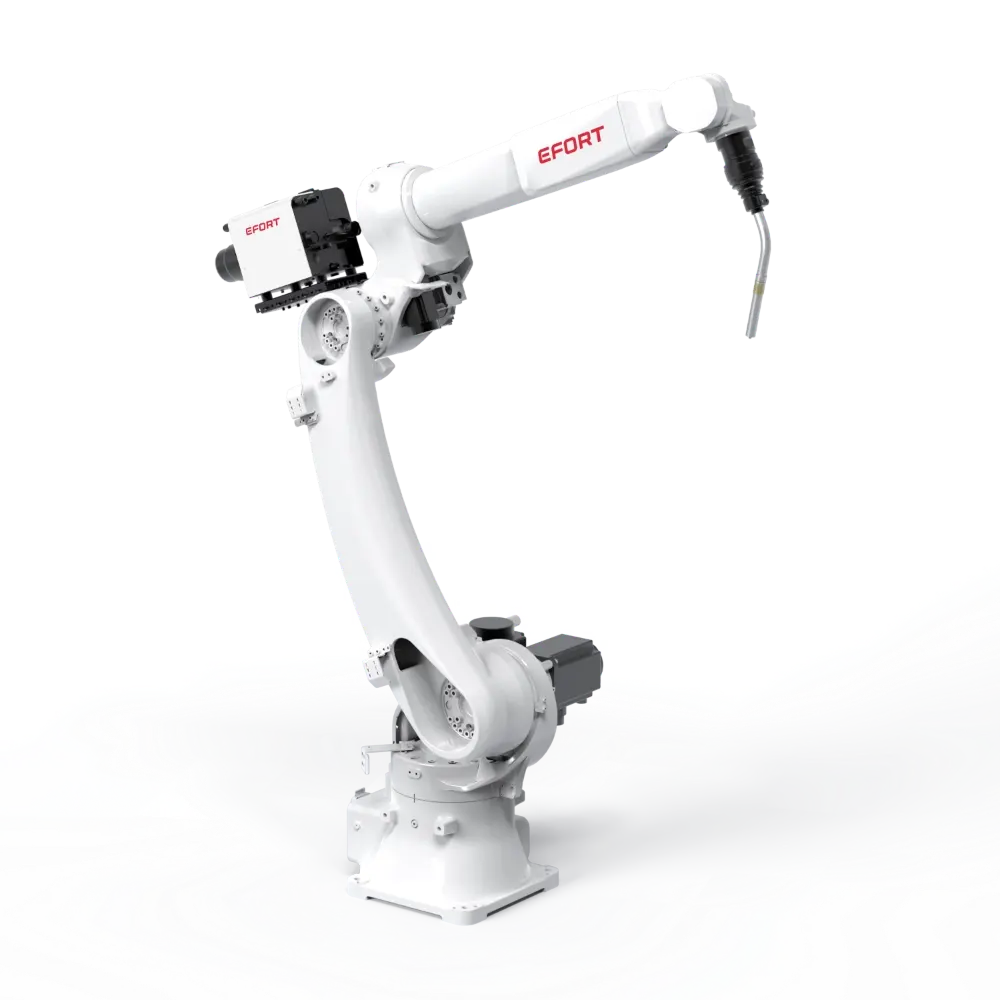
Robô de soldagem com capacidade de carga máxima de 12 kg e alcance máximo de 2025 mm à venda
Robô de soldagem ARC12-2000
- descrição
- Especificações
- Diagrama da estrutura do produto
-
descrição
Destaques
Graças ao design amplo e oco, o cabo pode ser encaminhado de forma oca, melhorando efetivamente sua vida útil, e a mudança de posição em espaços estreitos torna-se mais flexível;
Caixa de engrenagens de alta rigidez e forte resistência a impactos ajuda os clientes a enfrentar diversos cenários de aplicação;
Graças ao design de transmissão de alta rigidez e ao algoritmo de trajetória avançado, o desempenho de precisão aprimorado ajuda os clientes a enfrentar uma variedade de cenários de aplicação.Aplicações
Pode ser utilizado em aplicações de soldagem a arco.
Indústrias
Adequado para peças metálicas, peças automotivas, estruturas de aço e outras indústrias.
-
Especificações
Modelo
ARC12-2000
Tipo
Articulado
Eixos controlados
6 eixos
Carga útil máxima no pulso
12 kg
Repetibilidade
±0,03 mm
Peso do robô
185 kg
Alcançar
2025 mm
Grau de IP do robô
IP54 / IP67 (Pulso)
Grau de proteção IP do gabinete
IP54
Modo de condução
Servo drive CA
Instalação
Chão, de cabeça para baixo
Ambiente de instalação
Temperatura ambiente 0~45 ℃
Umidade ambiente
RH≤80%
(Não é permitido orvalho nem geada)
Aceleração de vibração
4,9 m/s²
(<0,5 G)
Carga admissível
momento no pulso
J4 22 N·m
J5 22 N·m J6 9,8 N·m Carga admissível
inércia no pulso
J4 0,65 kg·m²
J5 0,65 kg·m² J6 0,17 kg·m² Velocidade máxima
J1 220°/seg
J2 180°/seg J3 210°/seg J4 420°/seg J5 420°/seg J6 700°/seg Amplitude de movimento
J1 ±170°
J2 +77°/-160°
J3 +175°/-85°
J4 ±190°
J5 ±190° (A conexão externa ao corpo do robô.)
±140° (A conexão dentro do corpo do robô.)J6 ±450° (A conexão externa ao corpo do robô.)
±220° (A conexão dentro do corpo do robô.) -
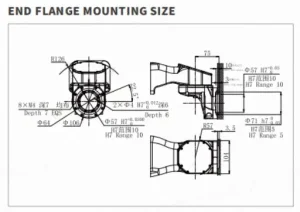
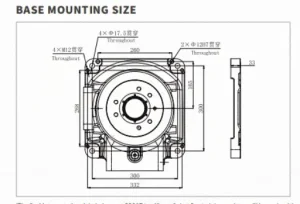
Diagrama da estrutura do produto

Categorias de produtos
COMO PODEMOS AJUDÁ-LO
Você pode entrar em contato conosco da maneira que for mais conveniente para você. Estamos disponíveis 24 horas por dia, 7 dias por semana, por e-mail ou telefone.


Produtos relacionados
-

Robô de soldagem com carga máxima de 12 kg e alcance máximo de 1479 mm à venda
ver mais
Robô de soldagem com carga máxima de 12 kg e alcance máximo de 1479 mm à venda
-
Capacidade de transporte no pulso:
12KG
-
Raio de alcance:
1479milímetros
-
Número de eixos de controle:
6eixo
-
Nível de proteção do gabinete de controle:
IP54
ver mais
-
-

Robô de soldagem com carga máxima de 10 kg e alcance máximo de 1604 mm à venda
ver mais
Robô de soldagem com carga máxima de 10 kg e alcance máximo de 1604 mm à venda
-
Capacidade de transporte no pulso:
10KG
-
Raio de alcance:
1604milímetros
-
Número de eixos de controle:
6eixo
-
Nível de proteção do gabinete de controle:
IP54
ver mais
-