










VR software integrated into EPS, VR takes wings, making spraying so simple!
EPS integrates VR functions, enabling fixed-point and tracking VR trajectory teaching, reproduction and operation, and distribution to robots.
No longer use offline software, offline programming, or simulation verification. VR programs can add process and logic control instructions to make their functions more complete.
Robot de sudură cu sarcină utilă maximă de 12 kg și rază de acțiune maximă de 2025 mm de vânzare
A Welding Robot ARC12-2000
- description
- Specifications
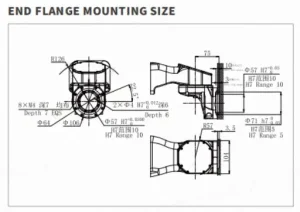
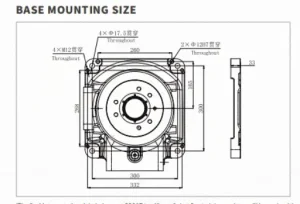
- Product structure diagram
-
description
Highlights
Thanks to the large and hollow design, the cable can be routed in a hollow way, effectively improving the service life of the cable, and the posture change in a narrow space is more flexible;
High-rigid gearbox with strong impact resistance helps customers challenge various application scenarios;
Thanks to the high stiffness transmission design and advanced trajectory algorithm, the improved accuracy performance helps customers to face variety of application scenarios.Aplicații
It can be used in Arc welding applications.
Industries
Suitable for metal parts, auto parts,steel structure and other industries.
-
Specifications
Model
ARC12-2000
Type
Articulated
Controlled axes
6 Axes
Max. payload on wrist
12 kg
Repeatability
±0.03 mm
Robot weight
185kg
Reach
2025 mm
Robot IP grade
IP54 / IP67(Wrist)
Cabinet IP grade
IP54
Drive mode
AC servo drive
Installation
Floor, Upside-down
Installation enviroment
Ambient temperature 0~45 ℃
Ambient humidity
RH≤80%
(No dew nor frost allowed)
Vibration acceleration
4.9 m/s²
(<0.5 G)
Allowable load
moment at wrist
J4 22 N·m
J5 22 N·m J6 9.8 N·m Allowable load
inertia at wrist
J4 0.65 kg·m²
J5 0.65 kg·m² J6 0.17 kg·m² Maximum speed
J1 220°/sec
J2 180°/sec J3 210°/sec J4 420°/sec J5 420°/sec J6 700°/sec Motion range
J1 ±170°
J2 +77°/-160°
J3 +175°/-85°
J4 ±190°
J5 ±190° (The connect outside robot body.)
±140° (The connect inside robot body .)J6 ±450° ( The connect outside robot body.)
±220° (The connect inside robot body .) -
Product structure diagram

Categorii de produse
CUM VĂ PUTEM AJUTA
Ne puteți contacta în orice mod convenabil pentru dumneavoastră. Suntem disponibili 24/7 prin e-mail sau telefon.


Related Products
-

Robot de sudură cu sarcină utilă maximă de 12 kg și rază de acțiune maximă de 1479 mm de vânzare
vezi mai multe
Robot de sudură cu sarcină utilă maximă de 12 kg și rază de acțiune maximă de 1479 mm de vânzare
-
Capacitatea de încărcare a încheieturii mâinii:
12KG
-
Raza accesibilă:
1479mm
-
Numărul de axe de control:
6axă
-
Nivel de protecție a tabloului de comandă:
IP54
vezi mai multe
-
-

Robot de sudură cu sarcină utilă maximă de 10 kg și rază de acțiune maximă de 1604 mm de vânzare
vezi mai multe
Robot de sudură cu sarcină utilă maximă de 10 kg și rază de acțiune maximă de 1604 mm de vânzare
-
Capacitatea de încărcare a încheieturii mâinii:
10KG
-
Raza accesibilă:
1604mm
-
Numărul de axe de control:
6axă
-
Nivel de protecție a tabloului de comandă:
IP54
vezi mai multe
-