


















Software VR integrat în EPS, VR-ul prinde aripi, simplificând pulverizarea!
EPS integrează funcții VR, permițând învățarea, reproducerea și operarea traiectoriei VR cu punct fix și urmărire, precum și distribuirea către roboți.
Nu mai folosiți software offline, programare offline sau verificare prin simulare. Programele VR pot adăuga instrucțiuni de control al proceselor și logicii pentru a-și face funcțiile mai complete.
Robot de sudură cu sarcină utilă maximă de 12 kg și rază de acțiune maximă de 2025 mm de vânzare
Un robot de sudură ARC12-2000
- descriere
- Specificații
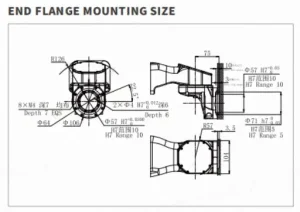
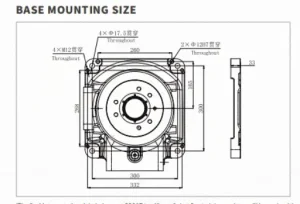
- Diagrama structurii produsului
-
descriere
Repere
Datorită designului mare și gol, cablul poate fi pozat într-un mod gol, îmbunătățind eficient durata de viață a cablului, iar schimbarea posturii într-un spațiu îngust este mai flexibilă;
Cutia de viteze extrem de rigidă, cu rezistență puternică la impact, ajută clienții să testeze diverse scenarii de aplicație;
Datorită designului transmisiei cu rigiditate ridicată și algoritmului avansat al traiectoriei, performanța îmbunătățită a preciziei ajută clienții să facă față unei varietăți de scenarii de aplicare.Aplicații
Poate fi utilizat în aplicații de sudură cu arc.
Industrii
Potrivit pentru piese metalice, piese auto, structuri metalice și alte industrii.
-
Specificații
Model
ARC12-2000
Tip
Articulat
Axe controlate
6 axe
Sarcină maximă la încheietura mâinii
12 kilograme
Repetabilitate
±0,03 mm
Greutatea robotului
185 kg
Ajunge
2025 mm
Gradul de protecție IP al robotului
IP54 / IP67 (încheietura mâinii)
Gradul de protecție al carcasei
IP54
Mod de condus
Servomotor de curent alternativ
Instalare
Podea, cu susul în jos
Mediul de instalare
Temperatura ambiantă 0~45 ℃
Umiditatea ambientală
RH≤80%
(Fără rouă și îngheț)
Accelerarea vibrațiilor
4,9 m/s²
(<0,5 g)
Sarcină admisibilă
moment la încheietura mâinii
J4 22 N·m
J5 22 N·m J6 9,8 N·m Sarcină admisibilă
inerție la încheietura mâinii
J4 0,65 kg·m²
J5 0,65 kg·m² J6 0,17 kg·m² Viteză maximă
J1 220°/sec
J2 180°/sec J3 210°/sec J4 420°/sec J5 420°/sec J6 700°/sec Gama de mișcare
J1 ±170°
J2 +77°/-160°
J3 +175°/-85°
J4 ±190°
J5 ±190° (Conectarea la corpul robotului în exterior.)
±140° (Conexiunea în interiorul corpului robotului).J6 ±450° (Conectarea corpului robotului în exterior.)
±220° (Conexiunea în interiorul corpului robotului). -
Diagrama structurii produsului

Categorii de produse
CUM VĂ PUTEM AJUTA
Ne puteți contacta în orice mod convenabil pentru dumneavoastră. Suntem disponibili 24/7 prin e-mail sau telefon.


Produse similare
-

Robot de sudură cu sarcină utilă maximă de 10 kg și rază de acțiune maximă de 1604 mm de vânzare
vezi mai multe
Robot de sudură cu sarcină utilă maximă de 10 kg și rază de acțiune maximă de 1604 mm de vânzare
-
Capacitatea de încărcare a încheieturii mâinii:
10KG
-
Raza accesibilă:
1604mm
-
Numărul de axe de control:
6axă
-
Nivel de protecție a tabloului de comandă:
IP54
vezi mai multe
-
-

Robot de sudură cu sarcină utilă maximă de 12 kg și rază de acțiune maximă de 1479 mm de vânzare
vezi mai multe
Robot de sudură cu sarcină utilă maximă de 12 kg și rază de acțiune maximă de 1479 mm de vânzare
-
Capacitatea de încărcare a încheieturii mâinii:
12KG
-
Raza accesibilă:
1479mm
-
Numărul de axe de control:
6axă
-
Nivel de protecție a tabloului de comandă:
IP54
vezi mai multe
-