


















Программное обеспечение VR интегрировано в EPS. VR обретает крылья, делая распыление таким простым!
EPS интегрирует функции виртуальной реальности, обеспечивая обучение, воспроизведение и эксплуатацию траектории виртуальной реальности с фиксированной точкой и отслеживанием, а также распространение ее среди роботов.
Больше не нужно использовать автономное программное обеспечение, автономное программирование или проверку симуляции. Программы виртуальной реальности могут добавлять инструкции по управлению процессами и логикой, чтобы сделать свои функции более полными.

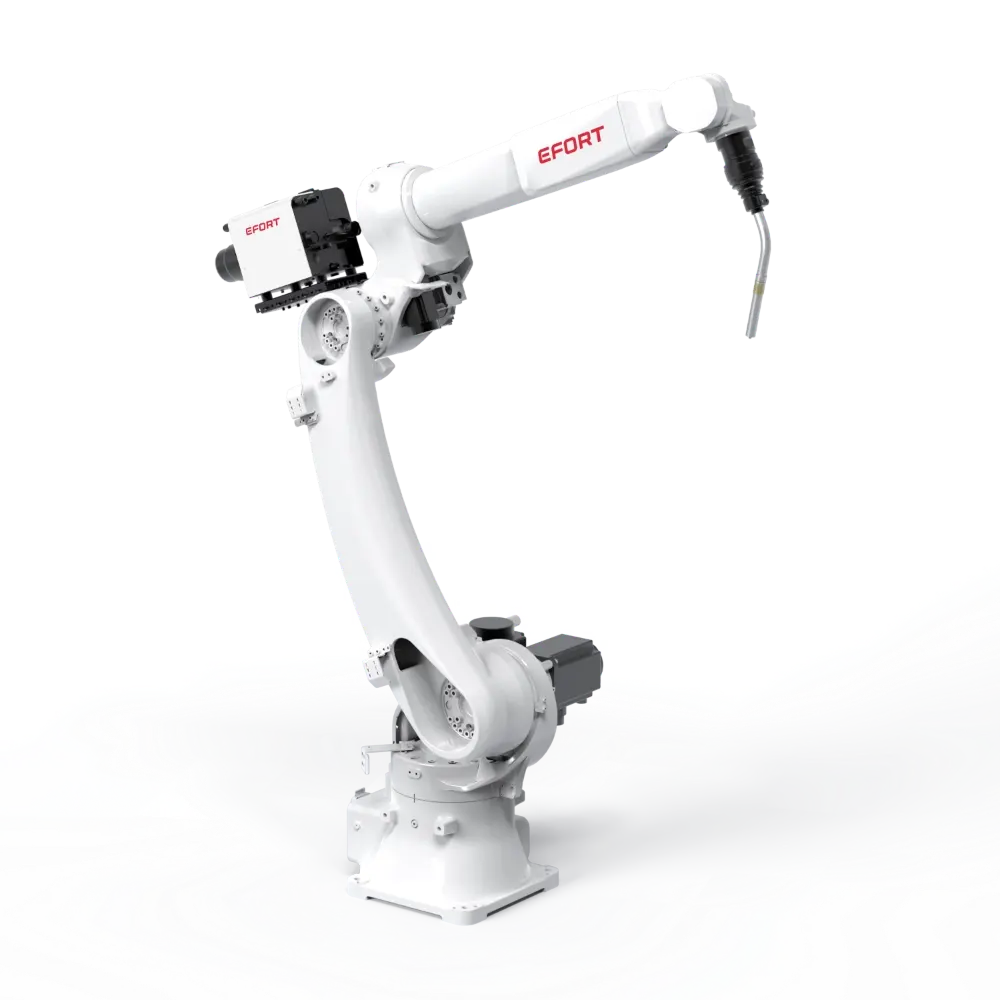
Сварочный робот с максимальной грузоподъемностью 12 кг и максимальным вылетом 1479 мм на продажу
Сварочный робот ARC12-1400
- описание
- Технические характеристики
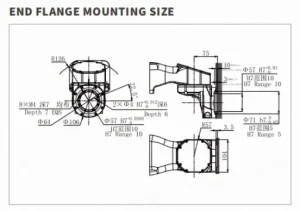
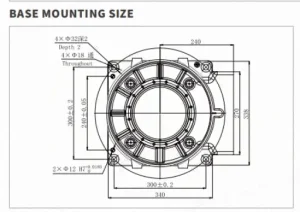
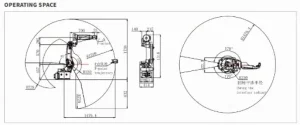
- Диаграмма структуры продукта
-
описание
Основные моменты
Благодаря большой и полой конструкции кабель можно проложить полым способом, что эффективно увеличивает срок его службы, а изменение положения в узком пространстве становится более гибким;
Высокопрочный редуктор с высокой ударопрочностью помогает заказчикам решать различные задачи;
Благодаря конструкции трансмиссии высокой жесткости и усовершенствованному алгоритму траектории улучшенные характеристики точности робота помогают заказчикам справляться с различными сценариями применения.Приложения
Может использоваться при дуговой сварке.
Отрасли промышленности
Подходит для металлических деталей, автозапчастей, стальных конструкций и других отраслей промышленности.

-
Технические характеристики
Модель
АРК12-1400
Тип
Сочлененный
Управляемые оси
6 осей
Максимальная полезная нагрузка на запястье
12 кг
Повторяемость
±0,03 мм
Вес робота
165 кг
Достигать
1479 мм
Степень защиты робота
IP54 / IP67 (запястье)
Степень защиты корпуса IP
IP54
Режим привода
Сервопривод переменного тока
Установка
Пол, Перевернутый, Стена
Среда установки
Температура окружающей среды 0~45 ℃
Влажность окружающей среды
RH≤80%
(Не допускается наличие росы и инея)
Ускорение вибрации
4,9 м/с²
(<0,5 Гс)
Допустимая нагрузка
момент на запястье
J4 26 Н·м
J5 26 Н·м J6 11 Н·м Допустимая нагрузка
инерция в запястье
J4 0,9 кг·м²
J5 0,9 кг·м² J6 0,3 кг·м² Максимальная скорость
J1 265°/сек
J2 255°/сек J3 270°/сек J4 450°/сек J5 450°/сек J6 700°/сек Диапазон движения
J1 ±170°
J2 +85°/-150°
J3 +175°/-85°
J4 ±190°
J5 ±190° (Подключение снаружи корпуса робота).
±140° (соединение внутри корпуса робота).J6 ±450° (соединение снаружи корпуса робота).
±220° (соединение внутри корпуса робота). -
Диаграмма структуры продукта
Категории продуктов
КАК МЫ МОЖЕМ ВАМ ПОМОЧЬ?
Вы можете связаться с нами любым удобным для вас способом. Мы доступны круглосуточно по электронной почте или по телефону.


Сопутствующие товары
-

Сварочный робот с максимальной грузоподъемностью 10 кг и максимальным вылетом 1604 мм на продажу
посмотреть больше
Сварочный робот с максимальной грузоподъемностью 10 кг и максимальным вылетом 1604 мм на продажу
-
Грузоподъемность запястья:
10КГ
-
Достижимый радиус:
1604мм
-
Количество осей управления:
6ось
-
Уровень защиты шкафа управления:
IP54
посмотреть больше
-
-
Сварочный робот с максимальной грузоподъемностью 12 кг и максимальным вылетом 2025 мм на продажу
посмотреть больше
Сварочный робот с максимальной грузоподъемностью 12 кг и максимальным вылетом 2025 мм на продажу
-
Грузоподъемность запястья:
12КГ
-
Достижимый радиус:
2025мм
-
Количество осей управления:
6ось
-
Уровень защиты шкафа управления:
IP54
посмотреть больше
-