Программное обеспечение VR интегрировано в EPS. VR обретает крылья, делая распыление таким простым!
EPS интегрирует функции виртуальной реальности, обеспечивая обучение, воспроизведение и эксплуатацию траектории виртуальной реальности с фиксированной точкой и отслеживанием, а также распространение ее среди роботов.
Больше не нужно использовать автономное программное обеспечение, автономное программирование или проверку симуляции. Программы виртуальной реальности могут добавлять инструкции по управлению процессами и логикой, чтобы сделать свои функции более полными.

5kg Payload 928mm Reach 6 Axis Hollow Wrist Collaborative Robot for Sale
6-Axis Collaborative Robot Hollow Wrist ECR5
- описание
- Технические характеристики
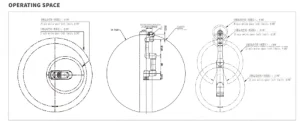
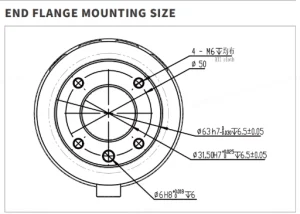
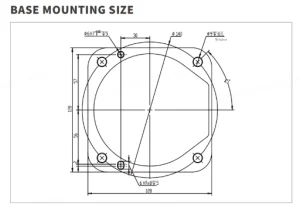
- Диаграмма структуры продукта
-
описание
Основные моменты
Multiple safety design in both hardware and software with sensitive collisiondetection, helps realize fenceless human-machine cooperative operation.
The aglie and easy-to-use drag teaching function greatly simplifies the program
ming and manipulation the robot. Thanks to the lightweight structure design,
customers can achieve rapid deployment and flexible production management;
Thanks to our origin of industrial robots, ECR 5 accuracy grade and operation stability can be comparable to that of industrial robots with the same load.
Приложения
It can be used in handling, sorting, assembling,machine tending, etc.
Отрасли промышленности
Suitable for 3C, food and beverage, metal parts, education, plastic, pharmaceutical and other industries,can also be used in consumer industries.

-
Технические характеристики
Модель
ECR5 Тип Сочлененный
Управляемые оси
6 осей Максимальная полезная нагрузка на запястье
5 kg Повторяемость
±0.03 mm
Вес робота
20.5 kg Достигать
928 mm Степень защиты робота
Ip 54 Степень защиты корпуса IP
Ip 40 Режим привода
Low-voltage servo drive
Установка
Пол, Перевёрнутый, Стена, Угол
Installation environment
Ambient
temperature
0~50 ℃ Влажность окружающей среды
RH≤80%(No dew nor frost allowed)
Ускорение вибрации
4.9 m/s²(<0.5 G)
Допустимая нагрузка
момент на запястье
J4 19 N·m
J5 13 N·m J6 13 N·m Допустимая нагрузка
инерция в запястье
J4 0.8 kg·m²
J5 0,4 кг·м²
J6 0,4 кг·м²
Максимальная скорость
J1 150°/ sec
J2 150°/ sec J3 150°/ sec J4 180°/ sec J5 180°/ sec J6 180°/ sec Диапазон движения
J1 ±180°
J2 ±180° J3 ±160° J4 ±180° J5 ±180° J6 ±360° -
Диаграмма структуры продукта