Программное обеспечение VR интегрировано в EPS. VR обретает крылья, делая распыление таким простым!
EPS интегрирует функции виртуальной реальности, обеспечивая обучение, воспроизведение и эксплуатацию траектории виртуальной реальности с фиксированной точкой и отслеживанием, а также распространение ее среди роботов.
Больше не нужно использовать автономное программное обеспечение, автономное программирование или проверку симуляции. Программы виртуальной реальности могут добавлять инструкции по управлению процессами и логикой, чтобы сделать свои функции более полными.
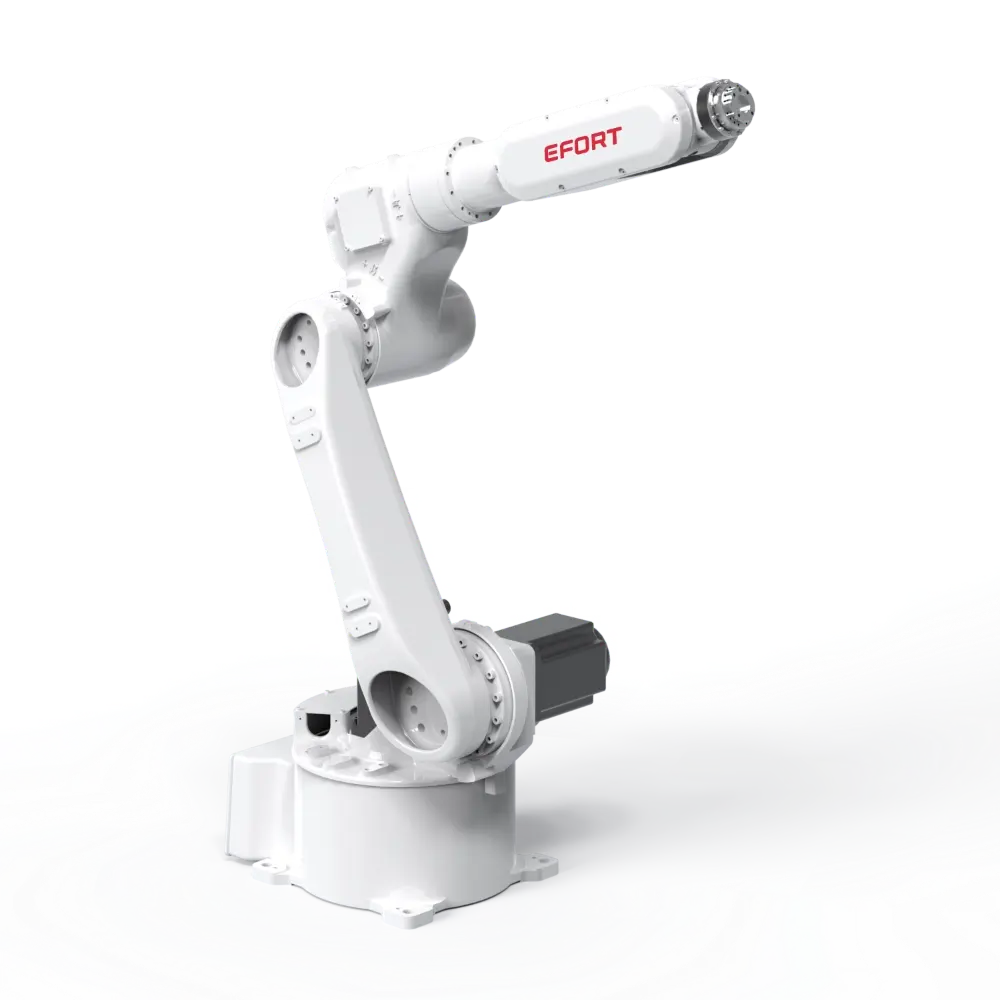
Продаётся робот с малой грузоподъёмностью 6 кг и радиусом действия 1433 мм
6-осевой робот малой грузоподъемности ER6-1400
- описание
- Технические характеристики
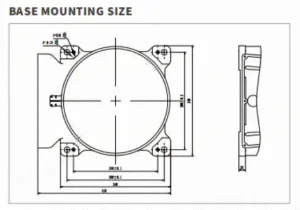
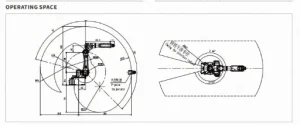
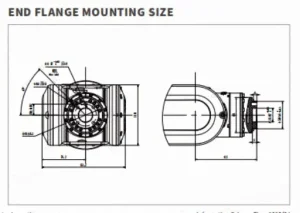
- Диаграмма структуры продукта
-
описание
Основные моменты
Комплексное программное обеспечение для процесса дуговой сварки может быть интегрировано для удовлетворения требований автоматической сварки в различных сценариях;
Доступная версия для сферы образования с возможностью разборки для удовлетворения потребностей образования с акцентом на интеллектуальное производство.
Приложения
Его можно использовать при погрузочно-разгрузочных работах, обслуживании машин, дуговой сварке и т. д.
Отрасли промышленности
Подходит для деталей из пластика, металла, образования и других отраслей.
-
Технические характеристики
Модель
ЭР6-1400
Тип
Сочлененный
Управляемые оси
6 осей
Максимальная полезная нагрузка на запястье
6 кг
Повторяемость
±0,05 мм
Вес робота
145 кг
Достигать
1433 мм
Степень защиты робота
IP54 / IP67 (запястье)
Степень защиты корпуса IP
IP54
Режим привода
Сервопривод переменного тока
Установка
Пол, Перевёрнутый, Стена, Угол
Среда установки
Температура окружающей среды 0~45 ℃
Влажность окружающей среды
RH≤80%
(Не допускается наличие росы и инея)
Ускорение вибрации
4,9 м/с²
(<0,5 Гс)
Допустимая нагрузка
момент на запястье
J4 12 Н·м
J5 12 Н·м J6 6 Н·м Допустимая нагрузка
инерция в запястье
J4 0,4 кг·м²
J5 0,4 кг·м² J6 0,2 кг·м² Максимальная скорость
J1 175°/сек
J2 175°/сек J3 185°/сек J4 330°/сек J5 360°/сек J6 600°/сек Диапазон движения
J1 ±165°
J2 +75°/-135°
J3 +170°/-83°
J4 ±180°
J5 ±130° J6 ±360° -
Диаграмма структуры продукта