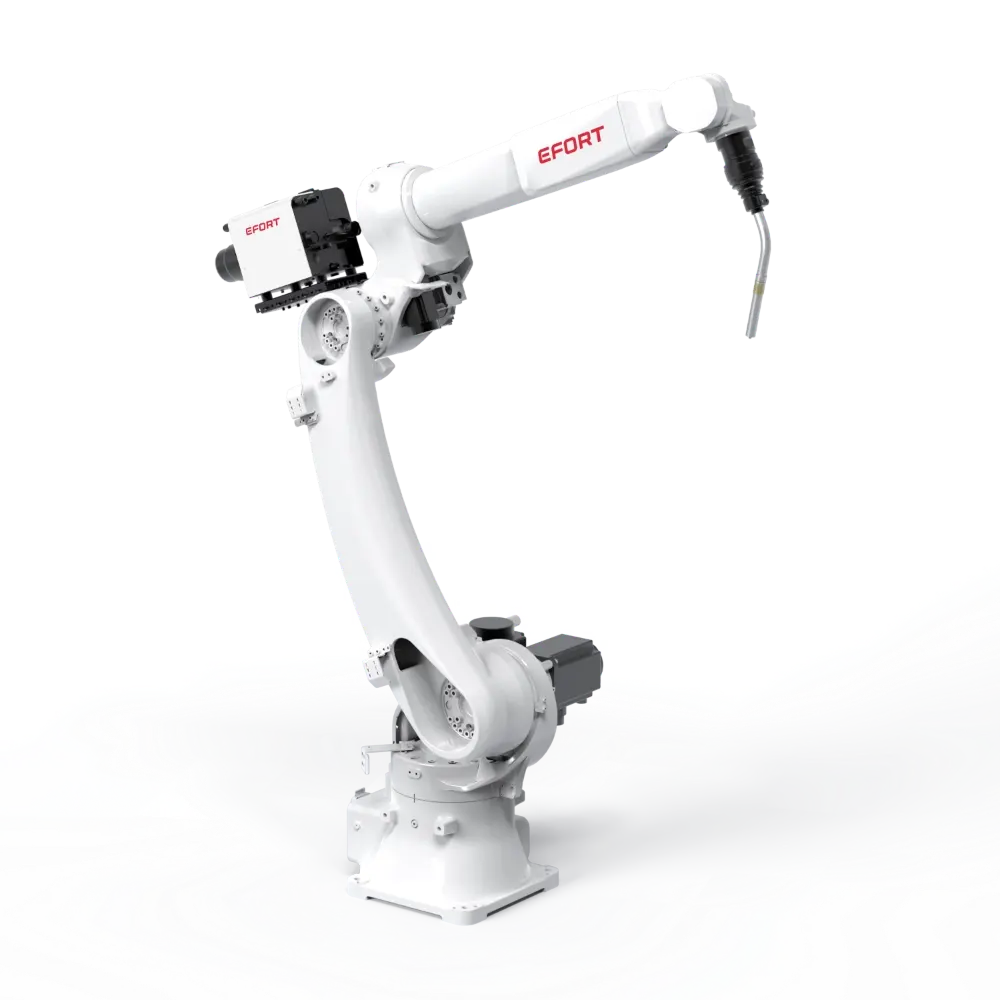
EFORT ARC10-1600 — это шестиосевой шарнирный промышленный робот средней грузоподъемности с большим радиусом действия, специально разработанный для дуговой сварки.
Благодаря превосходному соотношению цены и качества, стабильной и надежной работе, а также глубокой оптимизации сварочных процессов, он обеспечивает выдающуюся производительность на сварочных станциях и производственных линиях в таких отраслях, как автомобилестроение, строительная техника, металлообработка и производство стальных конструкций.