










Программное обеспечение VR интегрировано в EPS. VR обретает крылья, делая распыление таким простым!
EPS интегрирует функции виртуальной реальности, обеспечивая обучение, воспроизведение и эксплуатацию траектории виртуальной реальности с фиксированной точкой и отслеживанием, а также распространение ее среди роботов.
Больше не нужно использовать автономное программное обеспечение, автономное программирование или проверку симуляции. Программы виртуальной реальности могут добавлять инструкции по управлению процессами и логикой, чтобы сделать свои функции более полными.
Сварочный робот с максимальной грузоподъемностью 12 кг и максимальным вылетом 2025 мм на продажу
A Welding Robot ARC12-2000
- описание
- Технические характеристики
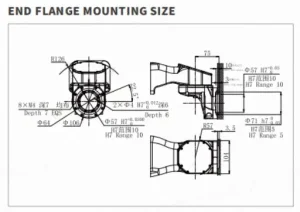
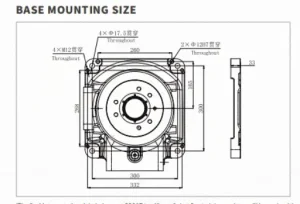
- Диаграмма структуры продукта
-
описание
Основные моменты
Thanks to the large and hollow design, the cable can be routed in a hollow way, effectively improving the service life of the cable, and the posture change in a narrow space is more flexible;
High-rigid gearbox with strong impact resistance helps customers challenge various application scenarios;
Thanks to the high stiffness transmission design and advanced trajectory algorithm, the improved accuracy performance helps customers to face variety of application scenarios.Приложения
It can be used in Arc welding applications.
Отрасли промышленности
Suitable for metal parts, auto parts,steel structure and other industries.
-
Технические характеристики
Модель
ARC12-2000
Тип
Сочлененный
Управляемые оси
6 осей
Максимальная полезная нагрузка на запястье
12 kg
Повторяемость
±0.03 mm
Вес робота
185kg
Достигать
2025 mm
Степень защиты робота
IP54 / IP67 (запястье)
Степень защиты корпуса IP
IP54
Режим привода
Сервопривод переменного тока
Установка
Floor, Upside-down
Среда установки
Температура окружающей среды 0~45 ℃
Влажность окружающей среды
RH≤80%
(Не допускается наличие росы и инея)
Ускорение вибрации
4,9 м/с²
(<0,5 Гс)
Допустимая нагрузка
момент на запястье
J4 22 N·m
J5 22 N·m J6 9.8 N·m Допустимая нагрузка
инерция в запястье
J4 0.65 kg·m²
J5 0.65 kg·m² J6 0.17 kg·m² Максимальная скорость
J1 220°/sec
J2 180°/sec J3 210°/sec J4 420°/sec J5 420°/sec J6 700°/sec Диапазон движения
J1 ±170°
J2 +77°/-160°
J3 +175°/-85°
J4 ±190°
J5 ±190° (The connect outside robot body.)
±140° (The connect inside robot body .)J6 ±450° ( The connect outside robot body.)
±220° (The connect inside robot body .) -
Диаграмма структуры продукта

Категории продуктов
КАК МЫ МОЖЕМ ВАМ ПОМОЧЬ?
Вы можете связаться с нами любым удобным для вас способом. Мы доступны круглосуточно по электронной почте или по телефону.


Related Products
-

Сварочный робот с максимальной грузоподъемностью 10 кг и максимальным вылетом 1604 мм на продажу
посмотреть больше
Сварочный робот с максимальной грузоподъемностью 10 кг и максимальным вылетом 1604 мм на продажу
-
Грузоподъемность запястья:
10КГ
-
Достижимый радиус:
1604мм
-
Количество осей управления:
6ось
-
Уровень защиты шкафа управления:
IP54
посмотреть больше
-
-

Сварочный робот с максимальной грузоподъемностью 12 кг и максимальным вылетом 1479 мм на продажу
посмотреть больше
Сварочный робот с максимальной грузоподъемностью 12 кг и максимальным вылетом 1479 мм на продажу
-
Грузоподъемность запястья:
12КГ
-
Достижимый радиус:
1479мм
-
Количество осей управления:
6ось
-
Уровень защиты шкафа управления:
IP54
посмотреть больше
-