In EPS integrierte VR-Software, VR verleiht Flügel und macht das Sprühen so einfach!
EPS integriert VR-Funktionen und ermöglicht das Lehren, Reproduzieren und Bedienen von VR-Trajektorien mit Fixpunkten und Tracking sowie die Verteilung an Roboter.
Verwenden Sie keine Offline-Software, Offline-Programmierung oder Simulationsüberprüfung mehr. VR-Programme können Prozess- und Logiksteuerungsanweisungen hinzufügen, um ihre Funktionen zu vervollständigen.

5 kg Nutzlast, 928 mm Reichweite, 6-Achsen-Hohlhandgelenk-Kollaborationsroboter zu verkaufen
6-Achs-Kollaborativer Roboter mit Hohlgelenk ECR5
- Beschreibung
- Technische Daten
- Produktstrukturdiagramm
-
Beschreibung
Highlights
Mehrfache Sicherheitsvorkehrungen in Hardware und Software mit empfindlicher Kollisionserkennung tragen zur Realisierung eines barrierefreien, kooperativen Mensch-Maschine-Betriebs bei.
Die agile und einfach zu bedienende Drag-and-Drop-Funktion vereinfacht das Programm erheblich.
Der Roboter kann dank seiner leichten Bauweise gesteuert und manipuliert werden.
Kunden können eine schnelle Implementierung und ein flexibles Produktionsmanagement erreichen;
Dank unserer Herkunft aus der Industrieroboterbranche können Genauigkeitsgrad und Betriebsstabilität des ECR 5 mit denen von Industrierobotern mit gleicher Last vergleichbar sein.
Anwendungen
Es kann zum Handhaben, Sortieren, Montieren, Bedienen von Maschinen usw. verwendet werden.
Branchen
Geeignet für die Bereiche 3C, Lebensmittel und Getränke, Metallteile, Bildung, Kunststoff, Pharmazie und andere Branchen; kann auch in der Konsumgüterindustrie eingesetzt werden.

-
Technische Daten
Modell
ECR5 Typ Gelenkig
Gesteuerte Achsen
6 Achsen Max. Nutzlast am Handgelenk
5 kg Wiederholbarkeit
±0,03 mm
Robotergewicht
20,5 kg Erreichen
928 mm Roboter-IP-Klasse
IP 54 IP-Schutzklasse des Gehäuses
IP 40 Fahrmodus
Niederspannungs-Servoantrieb
Installation
Boden, umgedreht, Wand, Winkel
Installationsumgebung
Ambient
Temperatur
0~50 ℃ Umgebungsfeuchtigkeit
RH≤80% (Kein Tau oder Frost zulässig)
Schwingbeschleunigung
4,9 m/s² (<0,5 G)
Zulässige Belastung
Moment am Handgelenk
J4 19 N·m
J5 13 N·m J6 13 N·m Zulässige Belastung
Trägheit am Handgelenk
J4 0,8 kg·m²
J5 0,4 kg·m²
J6 0,4 kg·m²
Höchstgeschwindigkeit
J1 150°/ Sek.
J2 150°/ Sek. J3 150°/ Sek. J4 180°/ Sek. J5 180°/ Sek. J6 180°/ Sek. Bewegungsbereich
J1 ±180°
J2 ±180° J3 ±160° J4 ±180° J5 ±180° J6 ±360° -
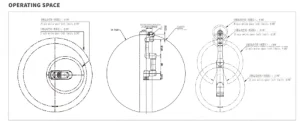
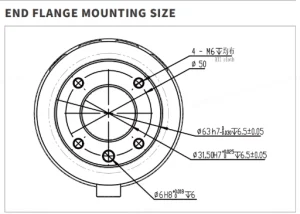
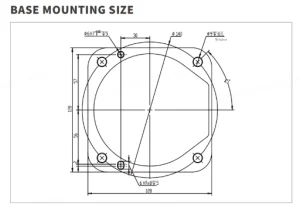
Produktstrukturdiagramm