


















In EPS integrierte VR-Software, VR verleiht Flügel und macht das Sprühen so einfach!
EPS integriert VR-Funktionen und ermöglicht das Lehren, Reproduzieren und Bedienen von VR-Trajektorien mit Fixpunkten und Tracking sowie die Verteilung an Roboter.
Verwenden Sie keine Offline-Software, Offline-Programmierung oder Simulationsüberprüfung mehr. VR-Programme können Prozess- und Logiksteuerungsanweisungen hinzufügen, um ihre Funktionen zu vervollständigen.

3 kg Nutzlast, 1929 mm Reichweite, 6-Achsen-Lemma-Handgelenk-Lackierroboter zu verkaufen
6-Achs-Lackierroboter Lemma Wrist GR630-1900
- Beschreibung
- Technische Daten
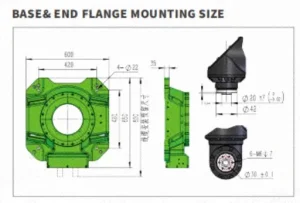
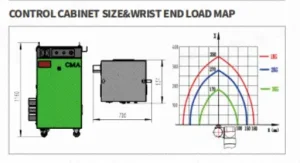
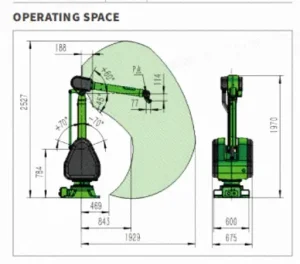
- Produktstrukturdiagramm
-
Beschreibung
Highlights
Selbstlernfunktion mit benutzerfreundlicher Oberfläche;
Lemma-Handgelenk, keine Singularität vorne, besonders geeignet zum Bemalen von Werkstücken an der Vorderseite;
Die Lackieranwendungssoftware ist standardmäßig im Roboter enthalten und verfügt über eine Online-Tracking-Funktion sowie die Möglichkeit zur Integration von Hilfsachsen.
ATEX-Explosionsschutzzertifizierung nach chinesischen und EU-Vorschriften, geeignet für Gaszonen der Zone 1 und
Betriebsumgebung für staubgefährdete Bereiche (Zone 21); besonders geeignet für Metallteile, Möbel, 3C-Kunststoffteile und andere unregelmäßige Bauteile.
Formteile.
Anwendungen
Anwendungsbereiche: Selbstlernfunktion wird unterstützt. Speziell entwickelt für kleine, unregelmäßig geformte Teile.
Lackierung: wie z. B. Motor, Getriebe, Wasserpumpe, Ventil, Einzylindermotor, Stuhl, Nachttisch, Elektroauto, Fahrrad, Motorradteile.
Branchen
Geeignet für Metallteile, Autoteile, Möbel, Motorradteile und andere Branchen.

-
Technische Daten
Maximale Nutzlast am Handgelenk
3 kg
Erreichen
1929 mm
Wiederholbarkeit
±1 mm
Bewegungsbereich
&
Maximal
Geschwindigkeit
Bewegungsbereich
Höchstgeschwindigkeit
J 1
±120°
120 °/Sek.
J 2
±70°
120 °/Sek.
J 3
-45 °/+60 °
120 °/Sek.
J 4
±360 °
540 °/Sek.
J 5
±360 °
540 °/Sek.
J 6
±360 °
540 °/Sek.
Zulässiges Lastmoment am Handgelenk
J 4
9,8 N . m
J 5
8,4 N . m
J 6
3 N . m
Zulässige Lastträgheit am Handgelenk
J 4
0,12 kg . m2
J 5
0,08 kg . m2
J 6
0,02 kg . m2
Struktur
6-Achsen-Serienstruktur
Installation
Boden, Engel, Wand, Kopfstehend
Sicherheitsniveau
EN ISO13849 PLd
IP-Schutzart
Roboter
IP 65
Kabinett
IP 52
Explosionsgeschützt
China
Ex ib mb px IIC T4 Gb
ATEX-Gas
II 2G Ex pxb IIC T4 Gb
ATEX-Staub
II 2D Ex pxb IIIC T135℃ Db
Umgebungsanforderungen
Stromspannung
AC380V(±10%)
Leistungskapazität
4,0 kVA
Temperatur 0-45 ℃
Luftfeuchtigkeit
20-80 % relative Luftfeuchtigkeit (keine Kondensation)
Nutzlast des Arms
Äußerer Arm
3 kg
Innenarm
3 kg
Gewicht
Roboter
400 kg
Kabinett
90 kg
-
Produktstrukturdiagramm
Produktkategorien
WIE KÖNNEN WIR IHNEN HELFEN
Sie können uns auf jede für Sie passende Weise kontaktieren. Wir sind rund um die Uhr per E-Mail oder Telefon erreichbar.


Verwandte Produkte
-

8 kg Nutzlast, 2715 mm Reichweite, 6-Achsen-Lemma-Handgelenk-Lackierroboter zu verkaufen
mehr sehen
8 kg Nutzlast, 2715 mm Reichweite, 6-Achsen-Lemma-Handgelenk-Lackierroboter zu verkaufen
-
Tragfähigkeit des Handgelenks:
8KG
-
Erreichbarer Radius:
2715mm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP54
mehr sehen
-
-

15 kg Nutzlast, 1500 mm Reichweite, 6-Achsen-Lackierroboter mit Hohlgelenk zu verkaufen
mehr sehen
15 kg Nutzlast, 1500 mm Reichweite, 6-Achsen-Lackierroboter mit Hohlgelenk zu verkaufen
-
Tragfähigkeit des Handgelenks:
15KG
-
Erreichbarer Radius:
1500mm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP54
mehr sehen
-
-

15 kg Nutzlast, 2900 mm Reichweite, 6-Achsen-Lemma-Handgelenk-Lackierroboter zu verkaufen
mehr sehen
15 kg Nutzlast, 2900 mm Reichweite, 6-Achsen-Lemma-Handgelenk-Lackierroboter zu verkaufen
-
Tragfähigkeit des Handgelenks:
15KG
-
Erreichbarer Radius:
2900 mmmm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP54
mehr sehen
-
-

16 kg Nutzlast, 3240 mm Reichweite, 6-Achsen-Handgelenk-Lackierroboter, globale Versorgung
mehr sehen
16 kg Nutzlast, 3240 mm Reichweite, 6-Achsen-Handgelenk-Lackierroboter, globale Versorgung
-
Tragfähigkeit des Handgelenks:
16KG
-
Erreichbarer Radius:
3240mm
-
Anzahl der Steuerachsen:
6Achse
-
Schutzniveau des Schaltschranks:
IP54
mehr sehen
-