


















¡Software VR integrado en EPS, VR toma alas y hace que la pulverización sea muy sencilla!
EPS integra funciones de VR, lo que permite la enseñanza, reproducción y operación de trayectorias de VR de punto fijo y seguimiento, y su distribución a robots.
Ya no es necesario usar software, programación ni verificación de simulación sin conexión. Los programas de RV pueden añadir instrucciones de control de procesos y lógica para que sus funciones sean más completas.

Robot de pintura de muñeca Lemma de 6 ejes con alcance de 1929 mm y carga útil de 3 kg, a la venta
Robot de pintura de 6 ejes Lemma Wrist GR630-1900
- descripción
- Presupuesto
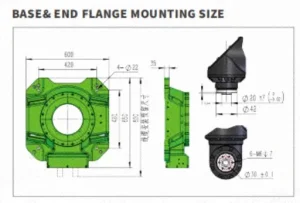
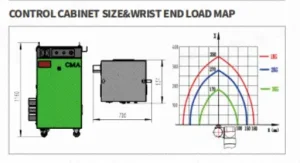
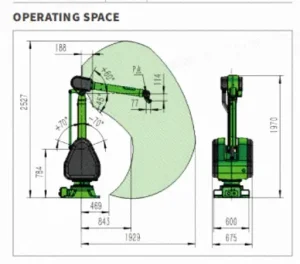
- Diagrama de estructura del producto
-
descripción
Reflejos
Función de autoaprendizaje con interfaz fácil de usar;
Muñeca Lemma, sin singularidad en la parte delantera, especialmente adecuada para pintar piezas de trabajo frontales;
El software de aplicación de pintura viene instalado por defecto en el robot, con función de seguimiento en línea y posibilidad de integración de ejes auxiliares;
Certificación ATEX a prueba de explosiones de China y la UE, puede utilizarse en zonas de gas 1 y
Zona 21: entorno operativo peligroso por polvo; especialmente adecuado para piezas de ferretería, muebles, piezas de plástico 3C y otros materiales irregulares.
partes de forma.
Aplicaciones
Aplicaciones con función de autoaprendizaje. Especialmente diseñado para piezas pequeñas de forma irregular.
Pintura: como por ejemplo, motor, reductor, bomba de agua, válvula, motor monocilíndrico, silla, mesita de noche, coche eléctrico, bicicleta, piezas de motocicleta.
Industrias
Adecuado para piezas metálicas, autopartes, muebles, piezas de motocicletas y otras industrias.

-
Presupuesto
Carga útil máxima en la muñeca
3 kg
Alcanzar
1929 mm
Repetibilidad
±1 mm
Rango de movimiento
&
Máximo
Velocidad
Rango de movimiento
Velocidad máxima
J 1
±120°
120 °/seg
J 2
±70°
120 °/seg
J 3
-45 °/+60 °
120 °/seg
J 4
±360°
540 °/seg
J 5
±360°
540 °/seg
J 6
±360°
540 °/seg
Momento de carga admisible en la muñeca
J 4
9,8 N·m
J 5
8,4 N·m
J 6
3 N·m
Inercia de carga admisible en la muñeca
J 4
0,12 kg . m2
J 5
0,08 kg . m2
J 6
0,02 kg . m2
Estructura
Estructura en serie de 6 ejes
Instalación
Suelo, Ángel, Pared, Boca abajo
Nivel de seguridad
EN ISO13849 PLd
Grado de protección IP
Robot
IP65
Gabinete
IP 52
A prueba de explosiones
Porcelana
Ex ib mb px IIC T4 Gb
Gas ATEX
II 2G Ex pxb IIC T4 Gb
Polvo ATEX
II 2D Ex pxb IIIC T135℃ Db
Requisitos ambientales
Voltaje
CA 380 V (±101 TP3T)
Capacidad de potencia
4,0 kVA
Temperatura 0-45 ℃
Humedad
20-80RH (sin condensación)
Carga útil del brazo
Brazo exterior
3 kg
Brazo interior
3 kg
Peso
Robot
400 kg
Gabinete
90 kg
-
Diagrama de estructura del producto
Categorías de productos
¿CÓMO PODEMOS AYUDARTE?
Puede contactarnos de la forma que le resulte más conveniente. Estamos disponibles 24/7 por correo electrónico o teléfono.


Productos relacionados
-

Robot de pintura de muñeca Lemma de 6 ejes con 8 kg de carga útil y alcance de 2715 mm, a la venta
ver más
Robot de pintura de muñeca Lemma de 6 ejes con 8 kg de carga útil y alcance de 2715 mm, a la venta
-
Capacidad de carga de la muñeca:
8Kilogramo
-
Radio alcanzable:
2715mm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP54
ver más
-
-

Robot de pintura de muñeca de 6 ejes con alcance de 3240 mm y carga útil de 16 kg. Suministro global.
ver más
Robot de pintura de muñeca de 6 ejes con alcance de 3240 mm y carga útil de 16 kg. Suministro global.
-
Capacidad de carga de la muñeca:
16Kilogramo
-
Radio alcanzable:
3240mm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP54
ver más
-
-

Robot de pintura de muñeca hueca de 6 ejes con alcance de 1500 mm y carga útil de 15 kg en venta
ver más
Robot de pintura de muñeca hueca de 6 ejes con alcance de 1500 mm y carga útil de 15 kg en venta
-
Capacidad de carga de la muñeca:
15Kilogramo
-
Radio alcanzable:
1500mm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP54
ver más
-
-

Robot de pintura de muñeca Lemma de 6 ejes con alcance de 2900 mm y carga útil de 15 kg, a la venta
ver más
Robot de pintura de muñeca Lemma de 6 ejes con alcance de 2900 mm y carga útil de 15 kg, a la venta
-
Capacidad de carga de la muñeca:
15Kilogramo
-
Radio alcanzable:
2900 mmmm
-
Número de ejes de control:
6eje
-
Nivel de protección del armario de control:
IP54
ver más
-