¡Software VR integrado en EPS, VR toma alas y hace que la pulverización sea muy sencilla!
EPS integra funciones de VR, lo que permite la enseñanza, reproducción y operación de trayectorias de VR de punto fijo y seguimiento, y su distribución a robots.
Ya no es necesario usar software, programación ni verificación de simulación sin conexión. Los programas de RV pueden añadir instrucciones de control de procesos y lógica para que sus funciones sean más completas.

Robot colaborativo de muñeca hueca de 6 ejes con alcance de 928 mm y carga útil de 5 kg en venta
Muñeca hueca robótica colaborativa de 6 ejes ECR5
- descripción
- Presupuesto
- Diagrama de estructura del producto
-
descripción
Reflejos
El diseño de seguridad múltiple, tanto en hardware como en software, con detección de colisiones sensible, ayuda a lograr una operación cooperativa hombre-máquina sin barreras.
La función de enseñanza de arrastre, ágil y fácil de usar, simplifica enormemente el programa.
ming y manipulación del robot. Gracias al diseño de estructura ligera,
Los clientes pueden lograr una rápida implementación y una gestión de producción flexible;
Gracias a nuestro origen en robots industriales, la precisión y la estabilidad operativa del ECR 5 pueden ser comparables a las de robots industriales con la misma carga.
Aplicaciones
Puede utilizarse para manipulación, clasificación, ensamblaje, operación de máquinas, etc.
Industrias
Adecuado para las industrias de electrónica de consumo, alimentación y bebidas, piezas metálicas, educación, plásticos, farmacéutica y otras; también puede utilizarse en industrias de consumo.

-
Presupuesto
Modelo
ECR5 Tipo Articulado
ejes controlados
6 ejes Carga útil máxima en la muñeca
5 kilos Repetibilidad
±0,03 mm
Peso del robot
20,5 kg Alcanzar
928 mm Grado IP para robots
IP 54 Grado de protección IP del armario
IP 40 Modo de conducción
servoaccionamiento de bajo voltaje
Instalación
Suelo, boca abajo, pared, ángulo
Entorno de instalación
Ambiente
temperatura
0~50 ℃ humedad ambiental
HR≤80% (Sin rocío ni heladas)
Aceleración de vibración
4,9 m/s² (<0,5 G)
Carga admisible
momento en la muñeca
J4 19 N·m
J5 13 N·m J6 13 N·m Carga admisible
inercia en la muñeca
J4 0,8 kg·m²
J5 0,4 kg·m²
J6 0,4 kg·m²
Velocidad máxima
J1 150°/seg
J2 150°/seg J3 150°/seg J4 180°/seg J5 180°/seg J6 180°/seg Rango de movimiento
J1 ±180°
J2 ±180° J3 ±160° J4 ±180° J5 ±180° J6 ±360° -
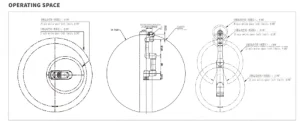
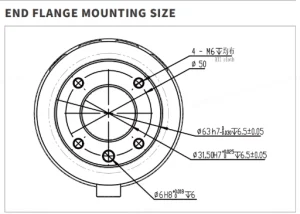
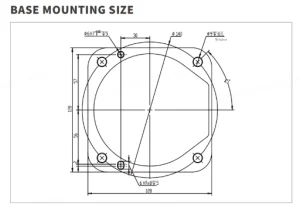
Diagrama de estructura del producto