Logiciel VR intégré à l'EPS, la VR prend son envol, rendant la pulvérisation si simple !
EPS intègre des fonctions VR, permettant l'enseignement, la reproduction et le fonctionnement de trajectoires VR à point fixe et à suivi, ainsi que la distribution aux robots.
Fini les logiciels hors ligne, la programmation hors ligne et la vérification des simulations. Les programmes de RV peuvent ajouter des instructions de contrôle de processus et de logique pour optimiser leurs fonctionnalités.
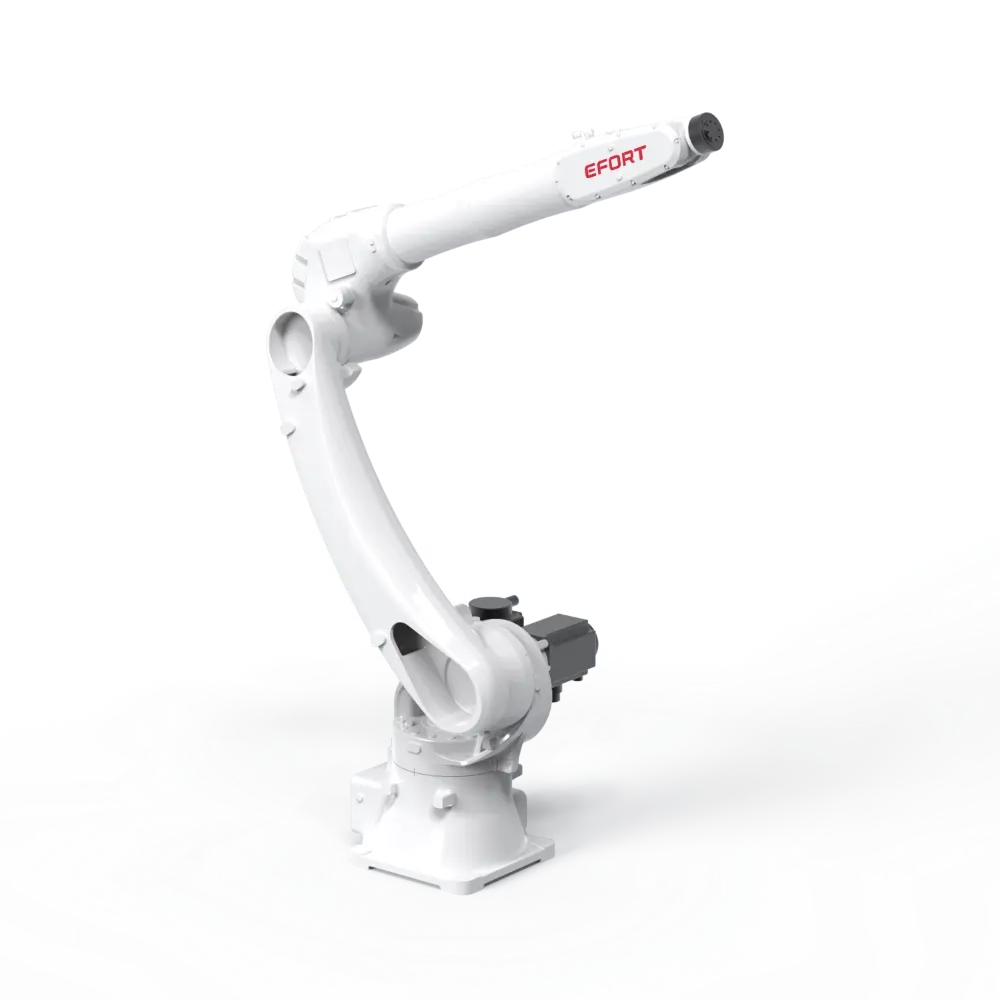
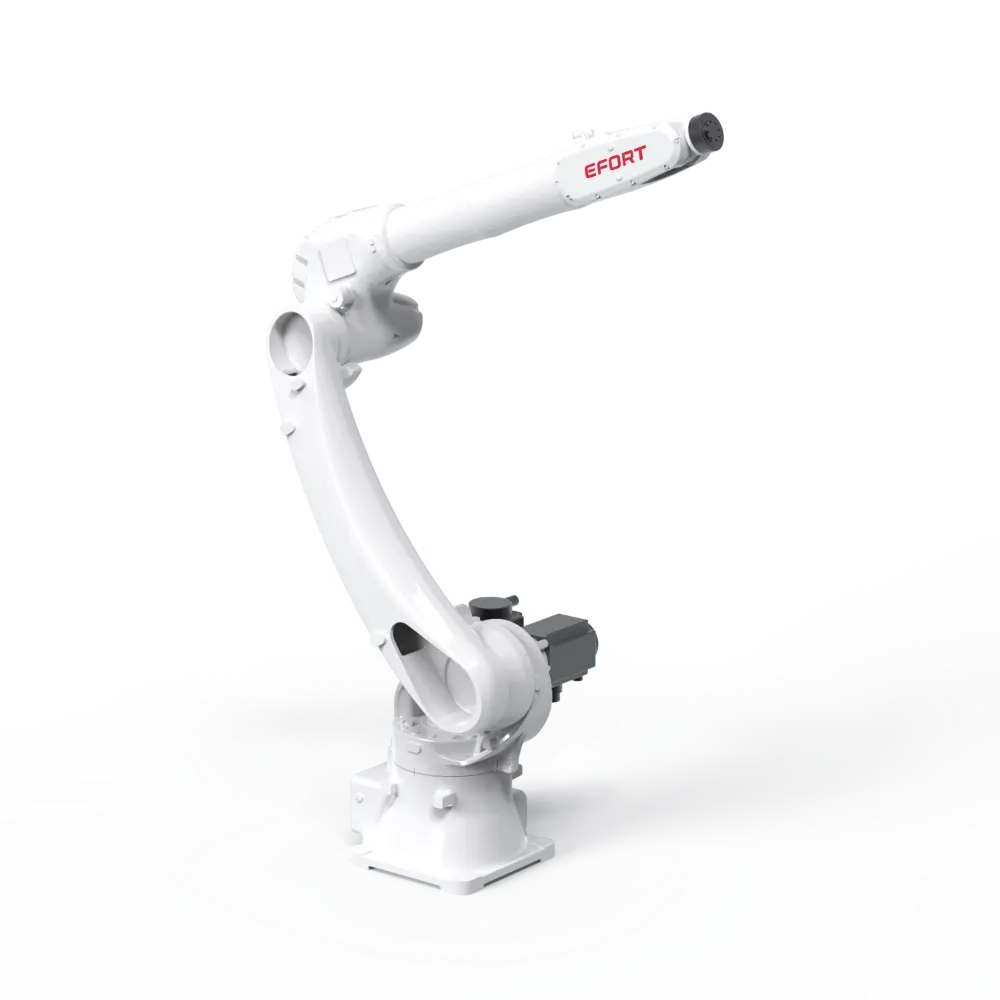
Robot à charge utile moyenne (charge utile maximale : 12 kg, portée maximale : 2 051 mm) à vendre
Robot ER12-2100 à 6 axes pour charge utile moyenne
- description
- Caractéristiques
- Diagramme de structure du produit
-
description
Points forts
Grâce à l'optimisation de la rigidité et de l'inertie apportée par le nouveau mécanisme
Conception cal, avec un algorithme de trajectoire avancé. Le takt a été amélioré de 20% à 30% ;
La conception compacte de l'armoire permet aux clients de déployer la ligne de production avec plus de flexibilité ;
Bracelet IP67, indice de protection élevé, pour résister aux environnements difficiles.
Applications
Il peut être utilisé dans la gestion des opérations (mise en page des chaînes de caractères), etc.
Industries
Convient aux secteurs de la logistique, des boissons et autres.
-
Caractéristiques
Modèle
ER12-2100
Taper
Articulé
Axes contrôlés
6 haches
Charge utile maximale au poignet
12 kg
Répétabilité
±0,05 mm
Poids du robot
186 kg
Atteindre
2051 mm
Robot IP grade
IP54 / IP67 (bracelet)
Armoire de qualité IP
IP20/IP54 (en option)
Mode de conduite
servomoteur AC
Installation
Sol, à l'envers, mur
environnement d'installation
Température ambiante 0~45 ℃
Humidité ambiante
RH≤80%
(Ni rosée ni gel ne sont autorisés)
Accélération des vibrations
4,9 m/s²
(<0,5 G)
Charge admissible
moment au poignet
J4 25 N·m
J5 25 N·m J6 12 N·m Charge admissible
inertie au niveau du poignet
J4 0,78 kg·m²
J5 0,78 kg·m² J6 0,3 kg·m² vitesse maximale
J1 220°/s
J2 180°/sec J3 200°/sec J4 360°/s J5 420°/s J6 600°/s Amplitude de mouvement
J1 ±170°
J2 +77°/-160°
J3 +165°/-85°
J4 ±190°
J5 ±120° J6 ±360° -
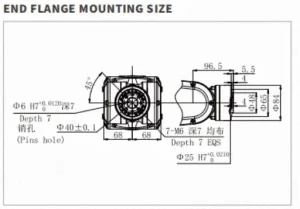
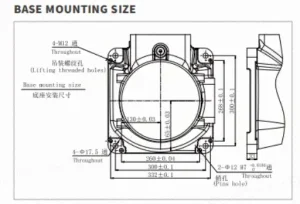
Diagramme de structure du produit