Logiciel VR intégré à l'EPS, la VR prend son envol, rendant la pulvérisation si simple !
EPS intègre des fonctions VR, permettant l'enseignement, la reproduction et le fonctionnement de trajectoires VR à point fixe et à suivi, ainsi que la distribution aux robots.
Fini les logiciels hors ligne, la programmation hors ligne et la vérification des simulations. Les programmes de RV peuvent ajouter des instructions de contrôle de processus et de logique pour optimiser leurs fonctionnalités.

Robot collaboratif à poignet creux 6 axes, charge utile de 5 kg, portée de 928 mm, à vendre
Robot collaboratif à 6 axes avec poignet creux ECR5
- description
- Caractéristiques
- Diagramme de structure du produit
-
description
Points forts
Une conception à sécurité multiple, tant matérielle que logicielle, avec une détection de collision sensible, permet de réaliser un fonctionnement coopératif homme-machine sans barrières.
La fonction d'apprentissage par glissement, simple et intuitive, simplifie grandement le programme.
Le robot permet de manipuler et d'effectuer des mouvements. Grâce à sa structure légère,
Les clients peuvent bénéficier d'un déploiement rapide et d'une gestion de production flexible ;
Grâce à notre origine dans le domaine des robots industriels, le niveau de précision et la stabilité de fonctionnement de l'ECR 5 sont comparables à ceux des robots industriels supportant la même charge.
Applications
Il peut être utilisé pour la manutention, le tri, l'assemblage, l'alimentation des machines, etc.
Industries
Adapté aux industries 3C, agroalimentaires, des pièces métalliques, de l'éducation, du plastique, pharmaceutiques et autres, il peut également être utilisé dans les industries de consommation.

-
Caractéristiques
Modèle
ECR5 Taper Articulé
Axes contrôlés
6 haches Charge utile maximale au poignet
5 kg Répétabilité
±0,03 mm
Poids du robot
20,5 kg Atteindre
928 mm Robot IP grade
IP 54 Armoire de qualité IP
IP 40 Mode de conduite
servomoteur basse tension
Installation
Sol, à l'envers, mur, angle
environnement d'installation
Ambiant
température
0~50 ℃ Humidité ambiante
RH≤80% (Ni rosée ni gel autorisés)
Accélération des vibrations
4,9 m/s² (< 0,5 G)
Charge admissible
moment au poignet
J4 19 N·m
J5 13 N·m J6 13 N·m Charge admissible
inertie au niveau du poignet
J4 0,8 kg·m²
J5 0,4 kg·m²
J6 0,4 kg·m²
vitesse maximale
J1 150°/sec
J2 150°/sec J3 150°/sec J4 180°/sec J5 180°/sec J6 180°/sec Amplitude de mouvement
J1 ±180°
J2 ±180° J3 ±160° J4 ±180° J5 ±180° J6 ±360° -
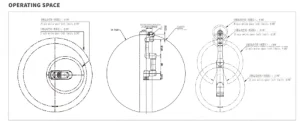
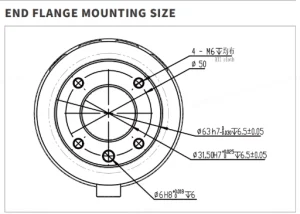
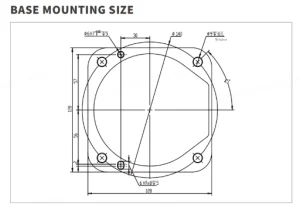
Diagramme de structure du produit