Grazie al software VR integrato in EPS, la realtà virtuale prende il volo e la spruzzatura diventa semplicissima!
EPS integra funzioni VR, consentendo l'insegnamento, la riproduzione e il funzionamento di traiettorie VR a punto fisso e di tracciamento, nonché la distribuzione ai robot.
Non utilizzare più software offline, programmazione offline o verifica tramite simulazione. I programmi VR possono aggiungere istruzioni di controllo logico e di processo per rendere le loro funzioni più complete.
Carico utile massimo 12 kg con portata massima 2051 mm Robot con carico utile medio in vendita
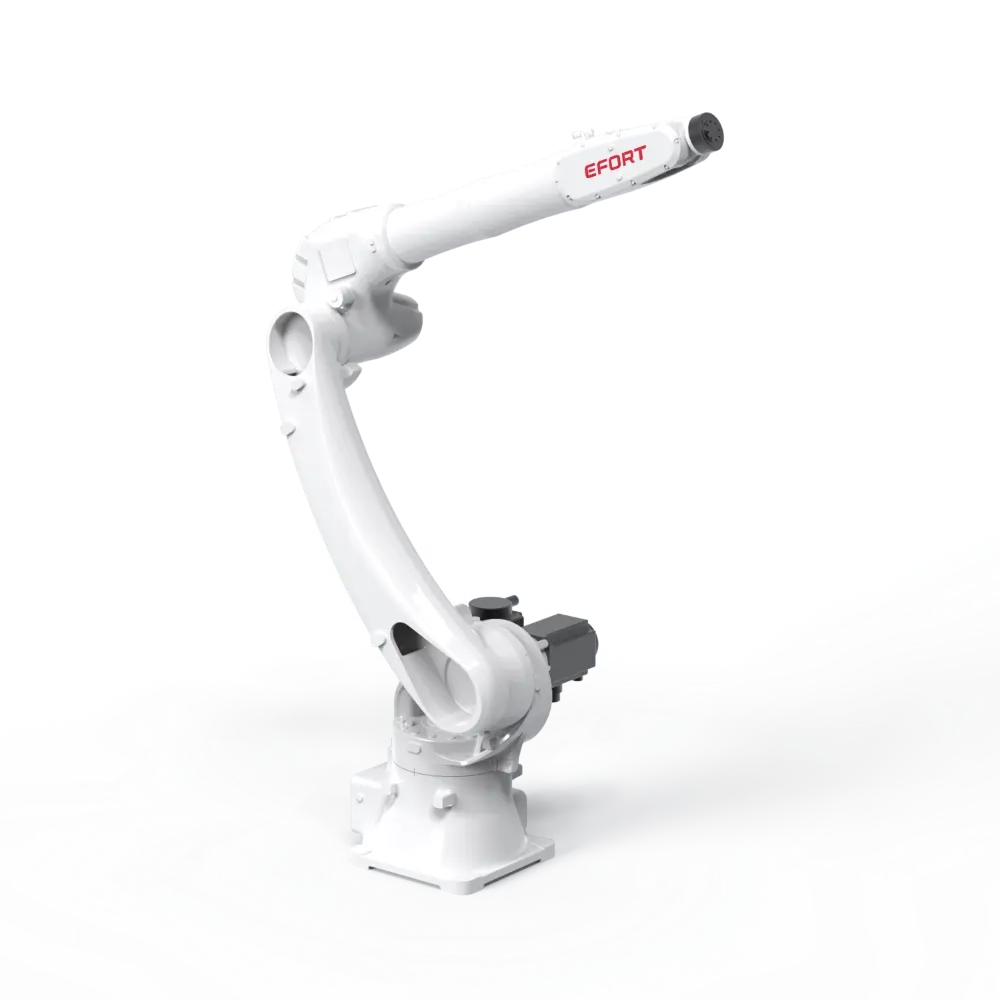
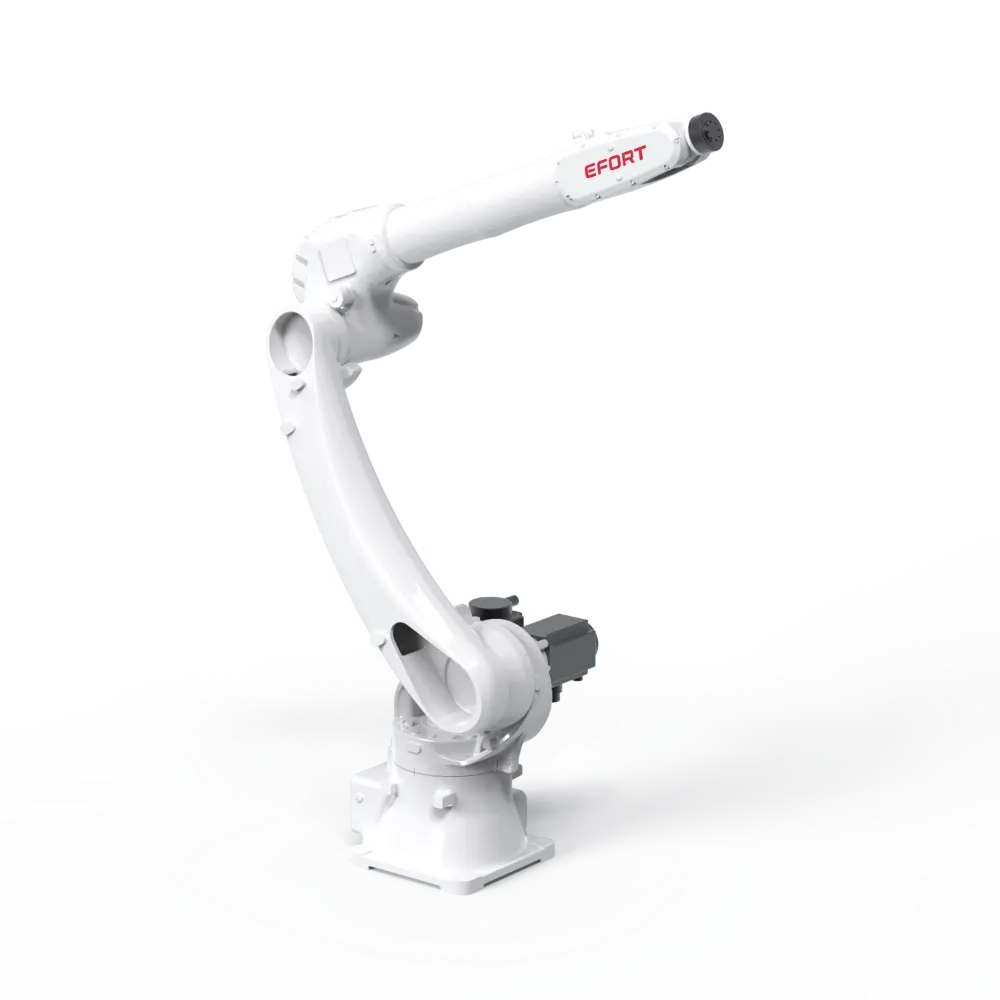
Robot a 6 assi con carico medio ER12-2100
- descrizione
- Specifiche
- Diagramma della struttura del prodotto
-
descrizione
Punti salienti
Grazie all'ottimizzazione della rigidezza e dell'inerzia apportata dal nuovo meccanismo
progettazione cal, con algoritmo di traiettoria avanzato. Il takt è migliorato da 20%-30%;
Il design compatto dell'armadio aiuta i clienti a implementare la linea di produzione con maggiore flessibilità;
Polso IP67, grado di protezione elevato, per resistere ad ambienti difficili.
Applicazioni
Può essere utilizzato nelle operazioni di gestione (layout delle stringhe), ecc.
Industrie
Adatto per l'industria logistica, delle bevande e altri settori.
-
Specifiche
Modello
ER12-2100
Tipo
Articolato
Assi controllati
6 assi
Carico utile massimo sul polso
12 chili
Ripetibilità
±0,05 millimetri
Peso del robot
186 kg
Portata
2051 millimetri
Grado IP del robot
IP54 / IP67 (polso)
Grado IP dell'armadio
IP20/ IP54 (opzionale)
Modalità di guida
Servoazionamento CA
Installazione
Pavimento, Capovolto, Parete
Ambiente di installazione
Temperatura ambiente 0~45 ℃
Umidità ambientale
RH≤80%
(Non sono ammesse né rugiada né brina)
Accelerazione delle vibrazioni
4,9 m/s²
(<0,5 G)
Carico ammissibile
momento al polso
J4 25 Nm
J5 25 Nm J6 12 Nm Carico ammissibile
inerzia al polso
J4 0,78 kg·m²
J5 0,78 kg·m² J6 0,3 kg·m² Velocità massima
J1 220°/secondo
J2 180°/secondo J3 200°/secondo J4 360°/sec J5 420°/sec J6 600°/secondo Gamma di movimento
J1 ±170°
J2 +77°/-160°
J3 +165°/-85°
J4 ±190°
J5 ±120° J6 ±360° -
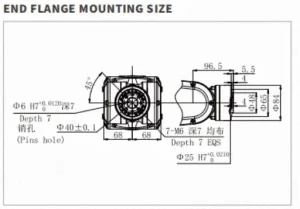
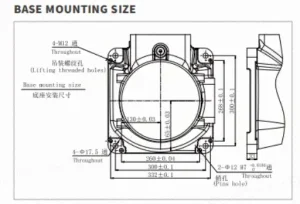
Diagramma della struttura del prodotto