


















Grazie al software VR integrato in EPS, la realtà virtuale prende il volo e la spruzzatura diventa semplicissima!
EPS integra funzioni VR, consentendo l'insegnamento, la riproduzione e il funzionamento di traiettorie VR a punto fisso e di tracciamento, nonché la distribuzione ai robot.
Non utilizzare più software offline, programmazione offline o verifica tramite simulazione. I programmi VR possono aggiungere istruzioni di controllo logico e di processo per rendere le loro funzioni più complete.

Robot per verniciatura a polso Lemma a 6 assi, portata 1929 mm, carico utile 3 kg, in vendita
Robot di verniciatura a 6 assi Lemma Wrist GR630-1900
- descrizione
- Specifiche
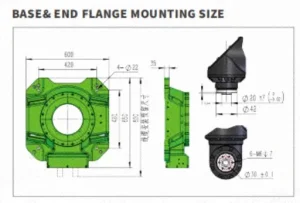
- Diagramma della struttura del prodotto
-
descrizione
Punti salienti
Funzione di autoapprendimento con interfaccia intuitiva;
Polso Lemma, nessuna singolarità nella parte anteriore, particolarmente adatto per la verniciatura di pezzi in lavorazione nella parte anteriore;
Il software applicativo di verniciatura è predefinito nel robot, con funzione di tracciamento online e possibilità di integrazione dell'asse ausiliario;
Certificazione antideflagrante ATEX della Cina e dell'UE, può essere utilizzata in gas della Zona 1 e
Ambiente operativo pericoloso per la polvere della zona 21; Particolarmente adatto per parti hardware, mobili, parti in plastica 3C e altri elementi irregolari
parti di forma.
Applicazioni
Applicazioni Funzione di autoapprendimento supportata. Progettato appositamente per piccole parti di forma irregolare
verniciatura: come motore, riduttore, pompa dell'acqua, valvola, motore monocilindrico, sedia, comodino, auto elettrica, bicicletta, parti di motociclette.
Industrie
Adatto per parti metalliche, ricambi auto, mobili, ricambi moto e altri settori.

-
Specifiche
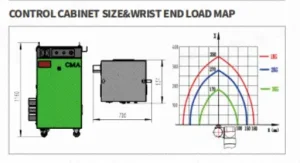
Carico utile massimo sul polso
3 kg
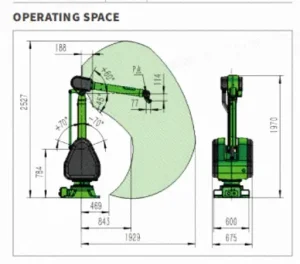
Portata
1929 millimetri
Ripetibilità
±1 millimetro
Gamma di movimento
e
Massimo
Velocità
Gamma di movimento
Velocità massima
J 1
±120°
120 °/secondo
J 2
±70°
120 °/secondo
J 3
-45 °/+60 °
120 °/secondo
J 4
±360 °
540 °/sec
J 5
±360 °
540 °/sec
J 6
±360 °
540 °/sec
Momento di carico ammissibile al polso
J 4
9,8 N . m
J 5
8,4 N . m
J 6
3 N. m
Inerzia del carico ammissibile al polso
J 4
0,12 kg . m2
J 5
0,08 kg . m2
J 6
0,02 kg . m2
Struttura
Struttura della serie a 6 assi
Installazione
Pavimento, Angelo, Muro, Sottosopra
Livello di sicurezza
EN ISO13849 PLd
Grado IP
Robot
IP 65
Mobiletto
IP 52
A prova di esplosione
Cina
Ex ib mb px IIC T4 Gb
ATEX-Gas
II 2G Ex pxb IIC T4 Gb
ATEX-Polvere
II 2D Ex pxb IIIC T135℃ Db
Requisiti ambientali
Voltaggio
AC380V (±10%)
Capacità di potenza
4,0 kVA
Temperatura 0-45 ℃
Umidità
20-80RH (senza condensa)
Carico utile del braccio
Braccio esterno
3 kg
Braccio interno
3 kg
Peso
Robot
400 kg
Mobiletto
90 chili
-
Diagramma della struttura del prodotto
Categorie di prodotto
COME POSSIAMO AIUTARTI
Puoi contattarci nel modo che preferisci. Siamo disponibili 24 ore su 24, 7 giorni su 7, via email o telefono.


Prodotti correlati
-

Robot per verniciatura a polso cavo a 6 assi, portata 1500 mm, carico utile 15 kg, in vendita
vedi di più
Robot per verniciatura a polso cavo a 6 assi, portata 1500 mm, carico utile 15 kg, in vendita
-
Capacità di carico al polso:
15KG
-
Raggio raggiungibile:
1500mm
-
Numero di assi di controllo:
6asse
-
Livello di protezione dell'armadio elettrico:
IP54
vedi di più
-
-

Robot per verniciatura a polso Lemma a 6 assi, portata 2900 mm, carico utile 15 kg, in vendita
vedi di più
Robot per verniciatura a polso Lemma a 6 assi, portata 2900 mm, carico utile 15 kg, in vendita
-
Capacità di carico al polso:
15KG
-
Raggio raggiungibile:
2900mmmm
-
Numero di assi di controllo:
6asse
-
Livello di protezione dell'armadio elettrico:
IP54
vedi di più
-
-

Robot per verniciatura a polso a 6 assi, portata 3240 mm, carico utile 16 kg, fornitura globale
vedi di più
Robot per verniciatura a polso a 6 assi, portata 3240 mm, carico utile 16 kg, fornitura globale
-
Capacità di carico al polso:
16KG
-
Raggio raggiungibile:
3240mm
-
Numero di assi di controllo:
6asse
-
Livello di protezione dell'armadio elettrico:
IP54
vedi di più
-
-

Robot per verniciatura a polso Lemma a 6 assi, portata 2715 mm, carico utile 8 kg, in vendita
vedi di più
Robot per verniciatura a polso Lemma a 6 assi, portata 2715 mm, carico utile 8 kg, in vendita
-
Capacità di carico al polso:
8KG
-
Raggio raggiungibile:
2715mm
-
Numero di assi di controllo:
6asse
-
Livello di protezione dell'armadio elettrico:
IP54
vedi di più
-