Grazie al software VR integrato in EPS, la realtà virtuale prende il volo e la spruzzatura diventa semplicissima!
EPS integra funzioni VR, consentendo l'insegnamento, la riproduzione e il funzionamento di traiettorie VR a punto fisso e di tracciamento, nonché la distribuzione ai robot.
Non utilizzare più software offline, programmazione offline o verifica tramite simulazione. I programmi VR possono aggiungere istruzioni di controllo logico e di processo per rendere le loro funzioni più complete.

Robot collaborativo con polso cavo a 6 assi, portata 928 mm, carico utile 5 kg, in vendita
Robot collaborativo a 6 assi con polso cavo ECR5
- descrizione
- Specifiche
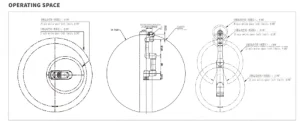
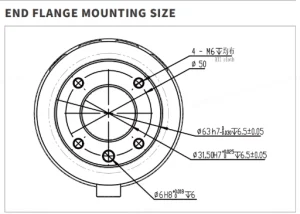
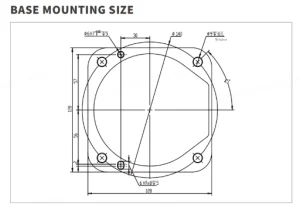
- Diagramma della struttura del prodotto
-
descrizione
Punti salienti
La progettazione di sicurezza multipla sia nell'hardware che nel software con rilevamento sensibile delle collisioni aiuta a realizzare un funzionamento cooperativo uomo-macchina senza barriere.
La funzione di insegnamento del trascinamento, facile da usare e intuitiva, semplifica notevolmente il programma
manipolare e manipolare il robot. Grazie al design della struttura leggera,
i clienti possono ottenere una rapida distribuzione e una gestione flessibile della produzione;
Grazie alla nostra origine di robot industriali, il grado di precisione ECR 5 e la stabilità operativa possono essere paragonabili a quelli dei robot industriali con lo stesso carico.
Applicazioni
Può essere utilizzato per la movimentazione, la selezione, l'assemblaggio, la manutenzione delle macchine, ecc.
Industrie
Adatto per i settori 3C, alimentare e delle bevande, delle parti metalliche, dell'istruzione, della plastica, farmaceutico e altri; può essere utilizzato anche nei settori dei beni di consumo.

-
Specifiche
Modello
ECR5 Tipo Articolato
Assi controllati
6 assi Carico utile massimo sul polso
5 kg Ripetibilità
±0,03 millimetri
Peso del robot
20,5 kg Portata
928 millimetri Grado IP del robot
Ip 54 Grado IP dell'armadio
IP 40 Modalità di guida
Servoazionamento a bassa tensione
Installazione
Pavimento, Capovolto, Parete, Angolo
Ambiente di installazione
Ambiente
temperatura
0~50 ℃ Umidità ambientale
RH≤80% (non sono ammesse né rugiada né brina)
Accelerazione delle vibrazioni
4,9 m/s²(<0,5 G)
Carico ammissibile
momento al polso
J4 19 Nm
J5 13 Nm J6 13 Nm Carico ammissibile
inerzia al polso
J4 0,8 kg·m²
J5 0,4 kg·m²
J6 0,4 kg·m²
Velocità massima
J1 150°/secondo
J2 150°/secondo J3 150°/secondo J4 180°/secondo J5 180°/secondo J6 180°/secondo Gamma di movimento
J1 ±180°
J2 ±180° J3 ±160° J4 ±180° J5 ±180° J6 ±360° -
Diagramma della struttura del prodotto