Software VR integrado ao EPS, VR ganha asas, tornando a pulverização muito mais simples!
O EPS integra funções de RV, permitindo o ensino, a reprodução e a operação de trajetórias de RV de ponto fixo e rastreamento, além da distribuição para robôs.
Não utilize mais software offline, programação offline ou verificação de simulação. Programas de RV podem adicionar instruções de controle de processo e lógica para tornar suas funções mais completas.
Carga útil máxima de 12 kg com alcance máximo de 2051 mm Robô de carga útil média à venda
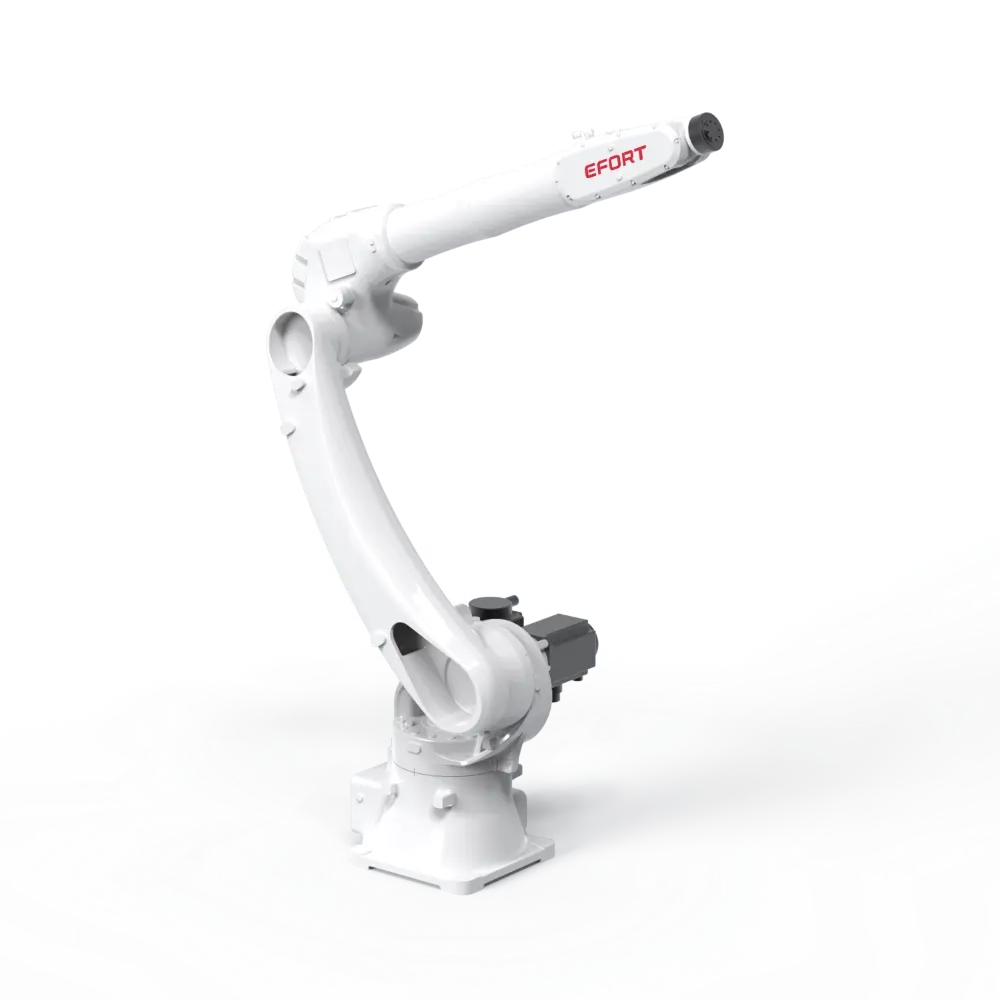
Robô de 6 eixos com capacidade de carga média ER12-2100
- descrição
- Especificações
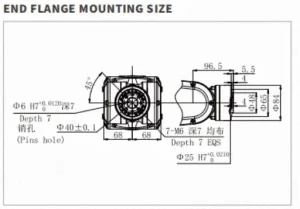
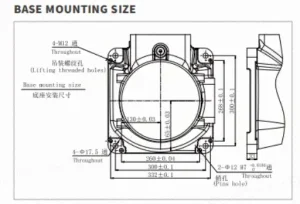
- Diagrama da estrutura do produto
-
descrição
Destaques
Graças à otimização da rigidez e da inércia proporcionada pela nova mecânica
projeto de calibração, com algoritmo de trajetória avançado. O takt foi aprimorado por 20%-30%;
O design compacto do gabinete ajuda os clientes a implantar a linha de produção com mais flexibilidade;
Pulseira com classificação IP67, alto grau de proteção, para suportar ambientes adversos.
Aplicações
Pode ser usado no tratamento de operações (formatação de strings), etc.
Indústrias
Indicado para os setores de logística, bebidas e outros.
-
Especificações
Modelo
ER12-2100
Tipo
Articulado
Eixos controlados
6 eixos
Carga útil máxima no pulso
12 kg
Repetibilidade
±0,05 mm
Peso do robô
186 kg
Alcançar
2051 mm
Grau de IP do robô
IP54 / IP67 (Pulso)
Grau de proteção IP do gabinete
IP20/IP54 (Opcional)
Modo de condução
Servo drive CA
Instalação
Chão, de cabeça para baixo, parede
Ambiente de instalação
Temperatura ambiente 0~45 ℃
Umidade ambiente
RH≤80%
(Não é permitido orvalho nem geada)
Aceleração de vibração
4,9 m/s²
(<0,5 G)
Carga admissível
momento no pulso
J4 25 N·m
J5 25 N·m J6 12 N·m Carga admissível
inércia no pulso
J4 0,78 kg·m²
J5 0,78 kg·m² J6 0,3 kg·m² Velocidade máxima
J1 220°/seg
J2 180°/seg J3 200°/seg J4 360°/seg J5 420°/seg J6 600°/seg Amplitude de movimento
J1 ±170°
J2 +77°/-160°
J3 +165°/-85°
J4 ±190°
J5 ±120° J6 ±360° -
Diagrama da estrutura do produto