Software VR integrado ao EPS, VR ganha asas, tornando a pulverização muito mais simples!
O EPS integra funções de RV, permitindo o ensino, a reprodução e a operação de trajetórias de RV de ponto fixo e rastreamento, além da distribuição para robôs.
Não utilize mais software offline, programação offline ou verificação de simulação. Programas de RV podem adicionar instruções de controle de processo e lógica para tornar suas funções mais completas.

Robô colaborativo de 6 eixos com pulso oco, alcance de 928 mm e capacidade de carga de 5 kg à venda.
Robô colaborativo de 6 eixos com pulso oco ECR5
- descrição
- Especificações
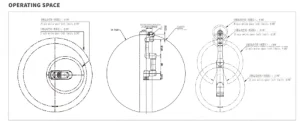
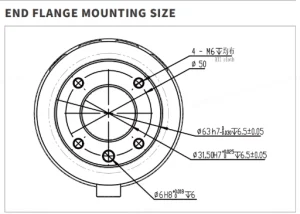
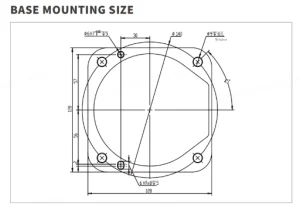
- Diagrama da estrutura do produto
-
descrição
Destaques
O design de segurança multifacetado, tanto em hardware quanto em software, com detecção de colisões sensível, ajuda a viabilizar a operação cooperativa homem-máquina sem barreiras.
A função de ensino por arrastar, ágil e fácil de usar, simplifica bastante o programa.
ming e manipulação do robô. Graças ao design de estrutura leve,
Os clientes podem alcançar implantação rápida e gerenciamento de produção flexível;
Graças à nossa origem em robôs industriais, o nível de precisão e a estabilidade operacional do ECR 5 podem ser comparáveis aos de robôs industriais com a mesma carga.
Aplicações
Pode ser utilizado no manuseio, triagem, montagem, operação de máquinas, etc.
Indústrias
Adequado para as indústrias de eletrônicos, alimentos e bebidas, peças metálicas, educação, plásticos, farmacêutica e outras, podendo também ser utilizado em indústrias de bens de consumo.

-
Especificações
Modelo
ECR5 Tipo Articulado
Eixos controlados
6 eixos Carga útil máxima no pulso
5 kg Repetibilidade
±0,03 mm
Peso do robô
20,5 kg Alcançar
928 mm Grau de IP do robô
IP 54 Grau de proteção IP do gabinete
IP 40 Modo de condução
Servoacionador de baixa tensão
Instalação
Chão, de cabeça para baixo, parede, ângulo
Ambiente de instalação
Ambiente
temperatura
0~50 ℃ Umidade ambiente
RH≤80% (Não é permitido orvalho nem geada)
Aceleração de vibração
4,9 m/s² (< 0,5 G)
Carga admissível
momento no pulso
J4 19 N·m
J5 13 N·m J6 13 N·m Carga admissível
inércia no pulso
J4 0,8 kg·m²
J5 0,4 kg·m²
J6 0,4 kg·m²
Velocidade máxima
J1 150°/seg
J2 150°/seg J3 150°/seg J4 180°/seg J5 180°/seg J6 180°/seg Amplitude de movimento
J1 ±180°
J2 ±180° J3 ±160° J4 ±180° J5 ±180° J6 ±360° -
Diagrama da estrutura do produto