Software VR integrat în EPS, VR-ul prinde aripi, simplificând pulverizarea!
EPS integrează funcții VR, permițând învățarea, reproducerea și operarea traiectoriei VR cu punct fix și urmărire, precum și distribuirea către roboți.
Nu mai folosiți software offline, programare offline sau verificare prin simulare. Programele VR pot adăuga instrucțiuni de control al proceselor și logicii pentru a-și face funcțiile mai complete.

Robot colaborativ cu 6 axe, cu sarcină utilă de 5 kg, rază de acțiune de 928 mm, cu încheietura mâinii goală, de vânzare
Robot colaborativ cu 6 axe, cu încheietură goală ECR5
- descriere
- Specificații
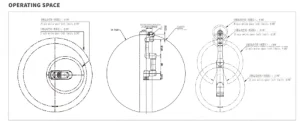
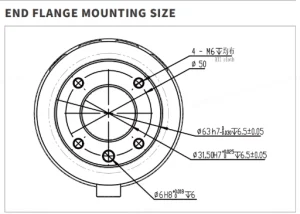
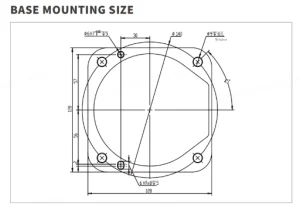
- Diagrama structurii produsului
-
descriere
Repere
Designul de siguranță multiplă, atât în hardware, cât și în software, cu detectare sensibilă a coliziunilor, ajută la realizarea unei funcționări cooperative om-mașină fără bariere.
Funcția de învățare a tragerii, ușor de utilizat și agilă, simplifică foarte mult programul.
manipularea robotului. Datorită designului structurii ușoare,
clienții pot realiza o implementare rapidă și o gestionare flexibilă a producției;
Datorită originii noastre în domeniul roboților industriali, gradul de precizie ECR 5 și stabilitatea în funcționare pot fi comparabile cu cele ale roboților industriali cu aceeași sarcină.
Aplicații
Poate fi utilizat la manipulare, sortare, asamblare, întreținerea mașinilor etc.
Industrii
Potrivit pentru 3C, alimente și băuturi, piese metalice, educație, plastic, farmaceutic și alte industrii, poate fi utilizat și în industriile de consum.

-
Specificații
Model
ECR5 Tip Articulat
Axe controlate
6 axe Sarcină maximă la încheietura mâinii
5 kilograme Repetabilitate
±0,03 mm
Greutatea robotului
20,5 kg Ajunge
928 mm Gradul de protecție IP al robotului
Ip 54 Gradul de protecție al carcasei
Ip 40 Mod de condus
Servomotor de joasă tensiune
Instalare
Podea, Cu susul în jos, Perete, Unghi
Mediul de instalare
Ambient
temperatură
0~50 ℃ Umiditatea ambientală
RH≤80% (Nu este permisă rouă sau îngheț)
Accelerarea vibrațiilor
4,9 m/s² (<0,5 G)
Sarcină admisibilă
moment la încheietura mâinii
J4 19 N·m
J5 13 N·m J6 13 N·m Sarcină admisibilă
inerție la încheietura mâinii
J4 0,8 kg·m²
J5 0,4 kg·m²
J6 0,4 kg·m²
Viteză maximă
J1 150°/sec
J2 150°/sec J3 150°/sec J4 180°/sec J5 180°/sec J6 180°/sec Gama de mișcare
J1 ±180°
J2 ±180° J3 ±160° J4 ±180° J5 ±180° J6 ±360° -
Diagrama structurii produsului