Программное обеспечение VR интегрировано в EPS. VR обретает крылья, делая распыление таким простым!
EPS интегрирует функции виртуальной реальности, обеспечивая обучение, воспроизведение и эксплуатацию траектории виртуальной реальности с фиксированной точкой и отслеживанием, а также распространение ее среди роботов.
Больше не нужно использовать автономное программное обеспечение, автономное программирование или проверку симуляции. Программы виртуальной реальности могут добавлять инструкции по управлению процессами и логикой, чтобы сделать свои функции более полными.

Продаётся 6-осевой коллаборативный робот с полым запястьем, грузоподъёмностью 5 кг и радиусом действия 928 мм
6-осевой коллаборативный робот с полым запястьем ECR5
- описание
- Технические характеристики
- Диаграмма структуры продукта
-
описание
Основные моменты
Многочисленные решения по безопасности как в аппаратном, так и в программном обеспечении с чувствительным обнаружением столкновений помогают реализовать безбарьерную совместную работу человека и машины.
Простая и удобная в использовании функция обучения перетаскиванию значительно упрощает программу.
Управление и манипуляции роботом. Благодаря лёгкой конструкции,
клиенты могут добиться быстрого развертывания и гибкого управления производством;
Благодаря нашему происхождению промышленные роботы класса точности ECR 5 и стабильности работы могут быть сопоставимы с промышленными роботами с такой же нагрузкой.
Приложения
Его можно использовать при обработке, сортировке, сборке, обслуживании машин и т. д.
Отрасли промышленности
Подходит для 3C, пищевой и фармацевтической промышленности, производства металлических деталей, образования, пластмасс и других отраслей, а также может использоваться в потребительских отраслях.

-
Технические характеристики
Модель
ЭКР5 Тип Сочлененный
Управляемые оси
6 осей Максимальная полезная нагрузка на запястье
5 кг Повторяемость
±0,03 мм
Вес робота
20,5 кг Достигать
928 мм Степень защиты робота
ИП 54 Степень защиты корпуса IP
ИП 40 Режим привода
Низковольтный сервопривод
Установка
Пол, Перевёрнутый, Стена, Угол
Среда установки
Окружающий
температура
0~50 ℃ Влажность окружающей среды
RH≤80% (не допускается образование росы и инея)
Ускорение вибрации
4,9 м/с²(<0,5 G)
Допустимая нагрузка
момент на запястье
J4 19 Н·м
J5 13 Н·м J6 13 Н·м Допустимая нагрузка
инерция в запястье
J4 0,8 кг·м²
J5 0,4 кг·м²
J6 0,4 кг·м²
Максимальная скорость
J1 150°/сек
J2 150°/сек J3 150°/сек J4 180°/сек J5 180°/сек J6 180°/сек Диапазон движения
J1 ±180°
J2 ±180° J3 ±160° J4 ±180° J5 ±180° J6 ±360° -
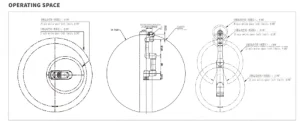
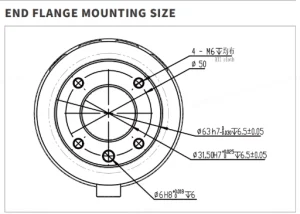
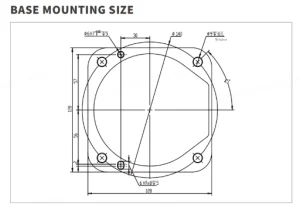
Диаграмма структуры продукта