


















Программное обеспечение VR интегрировано в EPS. VR обретает крылья, делая распыление таким простым!
EPS интегрирует функции виртуальной реальности, обеспечивая обучение, воспроизведение и эксплуатацию траектории виртуальной реальности с фиксированной точкой и отслеживанием, а также распространение ее среди роботов.
Больше не нужно использовать автономное программное обеспечение, автономное программирование или проверку симуляции. Программы виртуальной реальности могут добавлять инструкции по управлению процессами и логикой, чтобы сделать свои функции более полными.

Продаётся 6-осевой робот-окрасчик Lemma Wrist с грузоподъёмностью 8 кг и радиусом действия 2715 мм
6-осевой покрасочный робот Lemma Wrist GR680-2700
- описание
- Технические характеристики
- Диаграмма структуры продукта
-
описание
Основные моменты
Запястье леммы, без особенностей спереди, особенно подходит для покраски
в передней части заготовки;
Электрический шкаф управления соответствует уровню безопасности EN ISO13849 PLd и
поддерживает дополнительную ось; стандартное программное обеспечение для рисования, встроенные входы/выходы, простая интеграция, простота
программирование;
Сертификация ATEX по взрывозащите в Китае и ЕС, может использоваться в зоне 1 по газу и
Зона 21 — опасная рабочая среда с высокой степенью запыленности.
Приложения
Специально разработано для покраски деталей сложной формы: таких как инженерные двигатели,
принадлежности для инженерной техники и т. д. Также может использоваться для покраски деталей разных размеров, например, контейнеров.
Отрасли промышленности
Подходит для использования в автозапчастях, логистике и транспортной отрасли.

-
Технические характеристики
Максимальная полезная нагрузка на запястье
8 кг
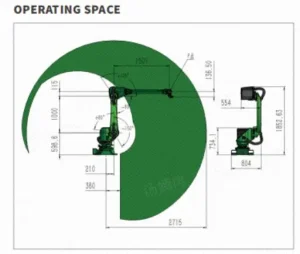
Достигать
2715 мм
Повторяемость
±0,2 мм
Диапазон движения
&
Максимум
Скорость
Диапазон движения
Максимальная скорость
J 1
±175 °
150 °/сек
J 2
-150 °/+80 °
145 °/сек
J 3
-80 °/+125 °
150 °/сек
J 4
±360 °
500 °/сек
J 5
±360 °
500 °/сек
J 6
±360 °
720 °/сек
Допустимый момент нагрузки на запястье
J 4
30 Н . м
J 5
25 Н . м
J 6
12 Н . м
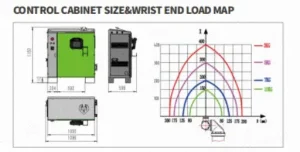
Допустимая инерция нагрузки на запястье
J 4
0,8 кг . м2
J 5
0,59 кг . м2
J 6
0,1 кг . м2
Структура
Структура серии 6-Axis
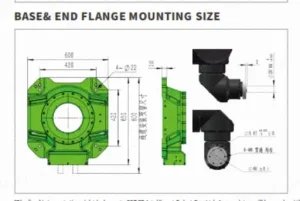
Установка
Пол, Стена (опционально), Перевернутый
Уровень безопасности
EN ISO13849 PLd
Степень защиты IP
Робот
IP 65
Кабинет
IP 54
Взрывозащищенный
Китай-Газ
Ex db ib pxb IIC T4 Gb
Китайская пыль
Ex tb ib pxb IIIC T135℃ Db
Требования к окружающей среде
Напряжение
AC380V(±10%)
Мощность
5,0 кВА
Температура 0-45 ℃
Влажность
20-80RH (без конденсации)
Полезная нагрузка руки
Внешняя рука
8 кг
Внутренняя часть руки
8 кг
Масса
Робот
450 кг
Кабинет
160 кг
-
Диаграмма структуры продукта
Категории продуктов
КАК МЫ МОЖЕМ ВАМ ПОМОЧЬ?
Вы можете связаться с нами любым удобным для вас способом. Мы доступны круглосуточно по электронной почте или по телефону.


Сопутствующие товары
-

Продаётся робот-окрасчик с полым запястьем, грузоподъёмностью 15 кг и радиусом действия 1500 мм, 6 осей
посмотреть больше
Продаётся робот-окрасчик с полым запястьем, грузоподъёмностью 15 кг и радиусом действия 1500 мм, 6 осей
-
Грузоподъемность запястья:
15КГ
-
Достижимый радиус:
1500мм
-
Количество осей управления:
6ось
-
Уровень защиты шкафа управления:
IP54
посмотреть больше
-
-

Продаётся 6-осевой робот-окрасчик Lemma Wrist с грузоподъёмностью 3 кг и радиусом действия 1929 мм
посмотреть больше
Продаётся 6-осевой робот-окрасчик Lemma Wrist с грузоподъёмностью 3 кг и радиусом действия 1929 мм
-
Грузоподъемность запястья:
3КГ
-
Достижимый радиус:
1929мм
-
Количество осей управления:
6ось
-
Уровень защиты шкафа управления:
IP52
посмотреть больше
-
-

Глобальная поставка 6-осевого робота-окрасочника с грузоподъемностью 16 кг и радиусом действия 3240 мм
посмотреть больше
Глобальная поставка 6-осевого робота-окрасочника с грузоподъемностью 16 кг и радиусом действия 3240 мм
-
Грузоподъемность запястья:
16КГ
-
Достижимый радиус:
3240мм
-
Количество осей управления:
6ось
-
Уровень защиты шкафа управления:
IP54
посмотреть больше
-
-

Продаётся 6-осевой робот-окрасчик Lemma Wrist с грузоподъёмностью 15 кг и радиусом действия 2900 мм
посмотреть больше
Продаётся 6-осевой робот-окрасчик Lemma Wrist с грузоподъёмностью 15 кг и радиусом действия 2900 мм
-
Грузоподъемность запястья:
15КГ
-
Достижимый радиус:
2900 мммм
-
Количество осей управления:
6ось
-
Уровень защиты шкафа управления:
IP54
посмотреть больше
-